GD1000设置专用的主从控制功能组,用户只需进行简单的参数设置即可实现多台电机间的主从运行,满足多机之间的功率平衡要求。主从控制有两种实现模式,由功能码P21.02进行选择。
P21.02=0时,为主从模式0,此模式下主机(1台)及从机(1台或多台)都设置为速度控制模式,使用下垂控制方法实现多机之间的功率平衡。控制框图如下:
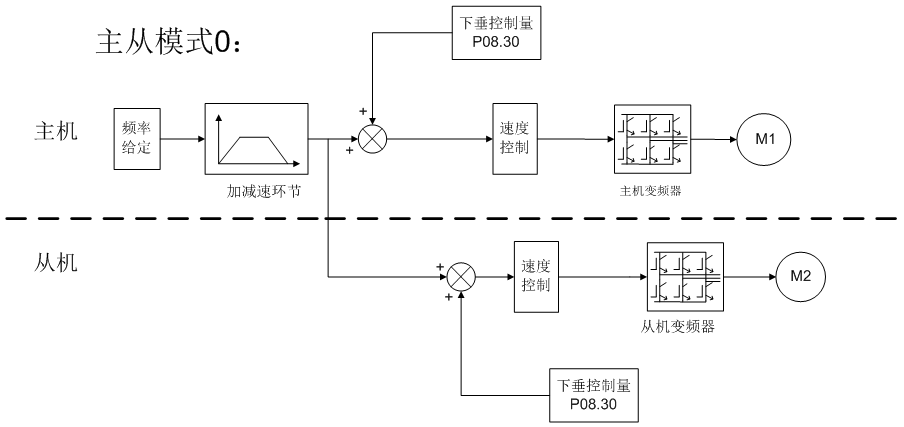
注意:
主机、从机均采用速度控制,使用下垂控制进行功率平衡;
该主从模式适用于刚性连接及柔性连接,一般在柔性较强的场合推荐使用;
相关参数设置流程如下:
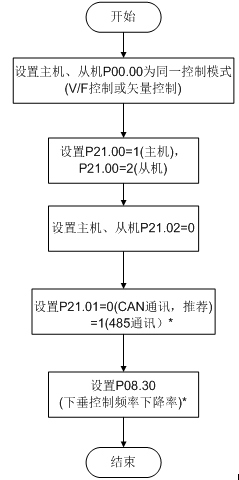
备注:
主机、从机通讯需要设置为同一模式(CAN通讯或485通讯);
P08.30为下垂控制频率下降率,主机、从机均需设置,一般情况下主机和从机可设为相同大小,设置范围为(0.5~3)倍的电机额定滑差,用户可根据电机铭牌参数计算电机的额定滑差。
P21.02=1时为主从模式1,此模式下,主机(1台)及从机(1台或多台)都设置为矢量控制模式,主机为速度控制,从机为转矩控制,通过内部速度环、转矩环的调节过程来实现多机间的功率平衡。控制框图如下:
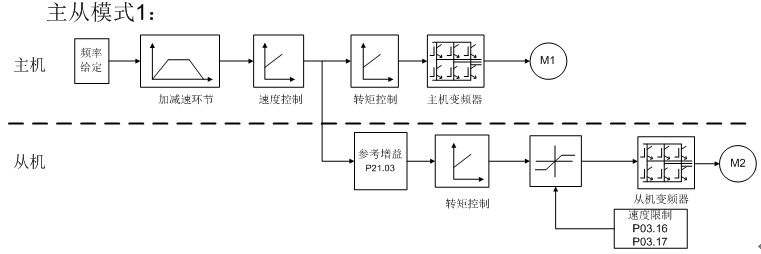
注意:
主机和从机应设为为同一类型的矢量控制模式,主机为速度控制,从机自动设定为转矩控制。
该主从模式适用于刚性连接及柔性连接;
相关参数设置流程如下:
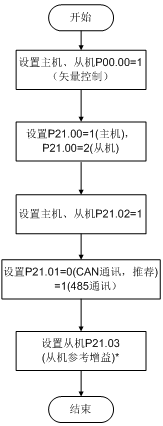
备注:
主机、从机通讯需要设置为同一模式(CAN通讯或485通讯);
从机参考增益一般设为1,但当主从电机功率大小不同时,需要适当调整增益,以满足稳态运行时各电机实际输出功率与额定功率的百分比基本一致。