PID控制是用于过程控制的一种常用方法,通过对被控量的反馈信号与目标量信号的差量进行比例、积分、微分运算,来调整变频器的输出频率,构成负反馈系统,使被控量稳定在目标量上。适用于流量控制、压力控制及温度控制等过程控制。控制基本原理框图如下:
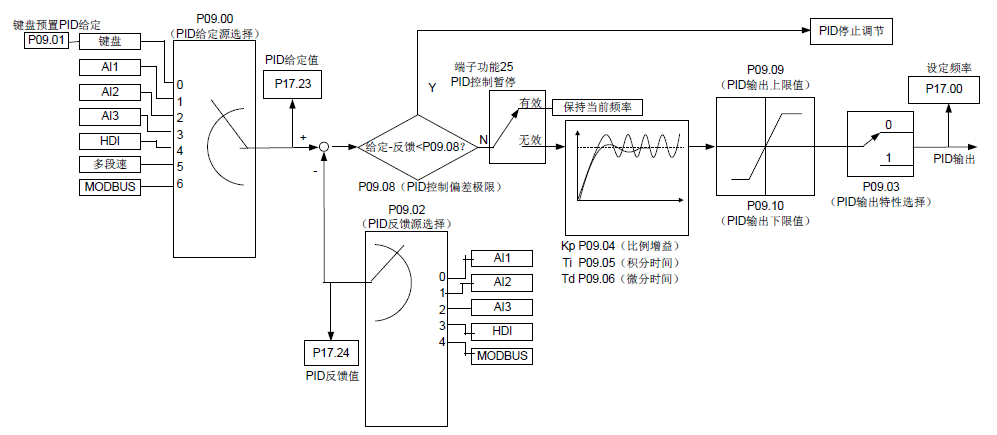
当频率指令选择(P00.06、P00.07)为7或者电压设定通道选择(P04.27)为6时,变频器运行模式为过程PID控制。
7.10.1 PID参数设定的一般步骤
a. 确定比例增益P
确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b. 确定积分时间Ti
比例增益P确定后,设定一个较大的积分时间数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c. 确定微分时间Td
微分时间Td一般不用设定,为0即可。
若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
d. 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
7.10.2 PID微调方法
设定PID控制的参数后,可以用以下的方法进行微调。
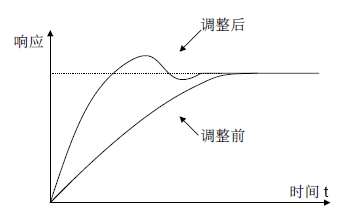
抑制超调:发生超调时,请缩短微分时间(Td),延长积分时间(Ti)。

尽快使其达到稳定状态:即使发生超调,但要尽快稳定控制时,请缩短积分时间(Ti),延长微分时间(Td)。
抑制周期较长的振动:如果周期性振动的周期比积分时间(Ti)的设定值还要长时,说明积分动作太强,延长积分时间(Ti)则可抑制振动。
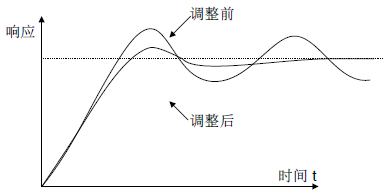
抑制周期较短的振动:振动周期较短,振动周期与微分时间(Td)的设定值几乎相同,说明微分动作太强。如缩短微分时间(Td),则可抑制振动。当将微分时间(Td)设定为0.00(即无微分控制),也无法抑制振动时,请减小比例增益。
