7.16.1. 编码器端口接线方式
1、 差分输出方式(适用于C1、H1型、H2型)
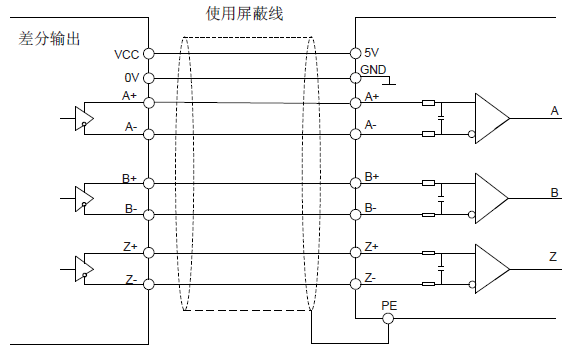
注意:差分型输出示意图是以H1型接口作为示例,C1型接口采用光耦隔离,H2型接口采用差分芯片,外部接线同H1型。
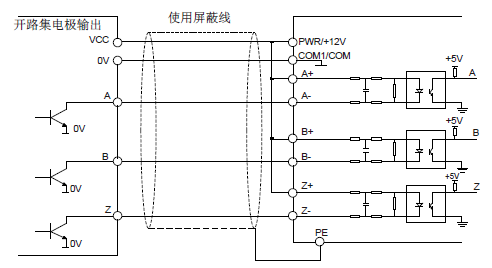
2、 开路集电极输出方式(适用于C1型、H1型)
3、 互补型输出方式(适用于C1型、H1型变频器)
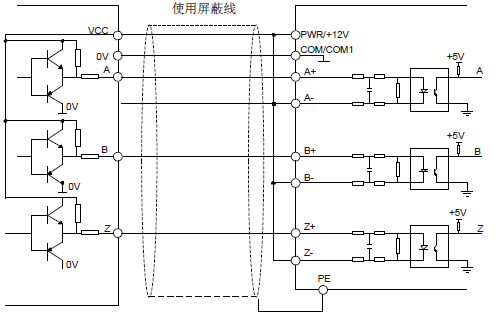
注意:
以上示意图是根据常用编码器接口特征给出的接线示例,此类信号特征和接线方式同样适用于H1型脉冲给定接口。
差分型输出示意图是以H1型接口作为示例, C1型接口采用光耦隔离,H2型接口采用差分芯片,外部接线同H1型。
在加入外部限流措施的情况下,C1、H1型可适用于更高电压等级的编码器信号或脉冲给定信号输入。
4、 推拉式输出编码器连接示意图
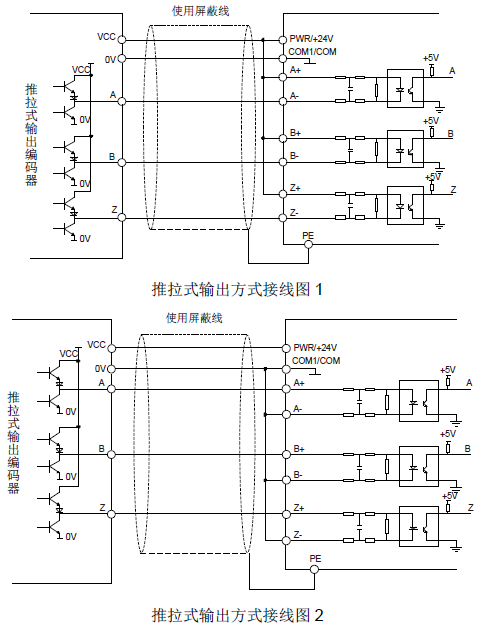
注意:在使用推拉输出式的编码器时,请参阅该编码器说明书中关于“输出电流”的电气规格。
1、 若“输出电流”中的“流入电流”大于25mA,“流出电流”小于25mA,请采用图1;
2、 若“输出电流”中的“流入电流”小于25mA,“流出电流”大于25mA,请采用图2;
3、 若“输出电流”中的“流入电流”与“流出电流”均大于25mA,则图1与图2均适用。
注意:配套支持主轴定位变频器时需接上Z信号,接线方式与A、B信号一致。
7.16.2. 调试步骤
1、 异步机闭环矢量调试步骤
(1)设置P00.18=1,恢复出厂参数设置
(2)设置P00.03,P00.04,及P02组电机铭牌参数
(3)电机参数自学习
a) 设置P00.15=1,进行旋转参数自学习
b) 设置P00.15=2,进行静止参数自学习
如果电机与负载可以脱开,则可以进行旋转参数自学习,否则进行静止参数自学习,自学习得到的参数,自动保存在P02组电机参数中。
(4)验证编码器是否安装及设置正确
a) 编码器方向确定及参数设置
设置编码器线数P20.01,设置P00.00=2,P00.10=20Hz,运行变频器,此时电机旋转为20Hz,观察P18.00的测速值是否正确,如果测速值为负,则表明编码器方向反向了,设置P20.02=1即可,如果测速值偏差较大,则表明P20.01设置错误。观察P18.02(编码器Z脉冲计数值)是否波动,如果波动,表明编码器有干扰或者P20.01设置错误,请检查接线及屏蔽层。
b) Z脉冲方向确定
设置P00.10=20Hz,P00.13(运行方向设定),分别设置正,反转观察P18.02的差值应小于5,如果通过设置P20.02的Z脉冲反向功能仍不能解决,则掉电将编码器A、B相对调,再观察P18.02的值正反转相差多大。Z脉冲方向只对采用Z脉冲进行主轴定位时的正反转定位精度有一定的影响。
(5)闭环矢量试运行
设置P00.00=3,进行闭环矢量控制,调整P00.10及P03组速度环及电流环PI参数,使之在整个范围内运行平稳。
(6)弱磁控制
可以设置弱磁调节器增益P03.26=0~2000,观察弱磁控制效果,P03.22~P03.24弱磁调节参数可根据需要调整。
2、 同步机闭环矢量控制调试步骤
(1)设置P00.18出厂参数设置
(2)设置P00.00=3(闭环矢量控制),设置P00.03,P00.04,及P02组电机铭牌参数。
(3)设置P20.00,P20.01编码器参数
当编码器为旋变编码器时,请设定编码器脉冲数为 (旋变极对数*1024),如4对极旋变,应设置P20.01=4096。
(4)验证编码器安装及设置是否正确
电机停止时, 观查P18.21(旋变角度)值应该不波动或波动很小,如果波动很大请检查接线及接地。缓慢旋转电机,P18.21应该缓慢变化,表明编码器接线正确;旋转多圈后P18.02值应该一直不变,且不为0, 这表明编码器Z信号正确。
(5)磁极初始位置自学习
设置P20.11=1或2(1为旋转自学习,2为静止自学习),按RUN键运行变频器。
a) 旋转自学习(P20.11 = 1)
自学习开始时检测当前磁极位置,然后加速到10Hz,学习编码器Z脉冲对应的磁极位置,然后减速停机。
运行过程中,如果出现ENC1O或者ENC1D故障,请设置P20.02=1,再重新进行自学习。
自学习完成后,学习得到的角度自动保存在P20.09,P20.10中。
b) 静止自学习
对于负载可脱离的场合,建议采用P20.11=1的旋转自学习,学习的角度精度比较高。如果负载不可脱离可以采用P20.11=2的自学习。自学习得到的磁极位置保存在P20.09,P20.10中。
(6)闭环矢量试运行
调整P00.10及P03组速度环及电流环PI参数,使之在整个范围内运行平稳。如果出现震荡,一般应调小速度环P03.00及P03.03的值,以及调小电流环P03.09,P03.10的值。在低速如果有电流振荡声,可调整低速滤波参数P20.05。
注意:更改电机线或编码器线后需要重新确定编码器的方向P20.02,同时需要重新进行磁极位置自学习。
3、 脉冲串控制调试步骤
脉冲输入是基于闭环矢量控制进行操作的,后续的主轴定位、回零操作和分度操作都要用到速度检测。
(1)设置P00.18=1,恢复出厂参数设置
(2)设置P00.03,P00.04,及P02组电机铭牌参数
(3)电机参数自学习:旋转参数自学习或者静止参数自学习
(4)验证编码器是否安装及设置正确。设置P00.00=3,P00.10=20Hz并运行,检测系统的控制效果和性能。
(5)设置P21.00=0001将定位模式选择为位置控制即脉冲串控制,脉冲指令方式有4种,通过P21.01(脉冲指令方式)设置。
在位置控制模式下可以通过P18查看位置给定与反馈的高位和低位、Z脉冲计数值P18.02、编码器实测频率P18.00、脉冲指令频率P18.17、位置调节器输出P18.19,并从中可以看出位置参考点P18.08和Z脉冲计数值P18.02的关系,脉冲指令频率P18.17、前馈P18.18和位置调节器输出P18.19。
(6)位置调节器有两个增益P21.02,P21.03,可以通过速度指令、转矩指令、端子实现两个增益的切换。
(7)当P21.08位置控制器输出限幅设置0时,则位置控制无效,此时脉冲串作为频率源,P21.13位置前馈增益需设置为100%,速度加减速时间由脉冲串的加减速时间决定,系统的脉冲串加减速时间是可以调整的。如果用脉冲串作为频率源进行速度控制,也可以将P21.00设置为0000,然后将频率源给定P00.06或P00.07设置为12,AB脉冲串设定,此时加减速时间由变频器的加减速时间决定,同时AB脉冲串的参数设定依然由P21组参数设定。在速度模式下,AB脉冲串滤波时间由P21.29设定。
(8)脉冲串的输入频率与编码器脉冲的反馈频率相一致,可通过更改P21.11,P21.12电子齿轮比率系数来改变两者的对应关系。
(9)当运行命令有效或者伺服使能有效(通过设置P21.00或者端子功能63)时,进入脉冲串伺服运行模式。
4、 主轴定位调试步骤
主轴定位就是在闭环矢量控制的基础上实现回零、分度等准停功能。
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求,无论是在位置控制模式下还是速度控制模式下都能实现主轴定位功能。
(5)设置P22.00.bit0=1使能主轴定位,设置P22.00.bit1选择主轴零点输入,当系统采用编码器测速时设置P22.00.bit1=0选择Z脉冲输入,当系统采用光电开关测速时设置P22.00.bit1=1选择光电开关作为零点输入;设置P22.00.bit2选择零点搜索模式,设置P22.00.bit3使能或不使能零点校正,通过设置P22.00.bit7选择零点校正模式
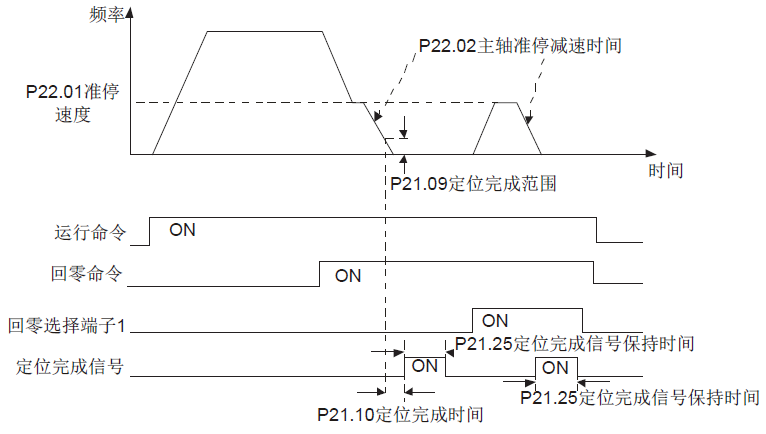
(6)主轴回零操作
a) 通过设置P22.00.bit4选择定位方向
b) 在P22组中一共有4个零点位置,通过对P05组回零输入端子选择(46、47)的设置,实现4选1的回零位置,当执行回零功能时,电机按照设定的定位方向准停到相应的回零位置,通过P18.10可以查看。
c) 主轴回零的定位长度由准停减速时间和准停速度决定。
(7)主轴分度操作
在P22组中一共有7个分度位置,通过对P05组分度输入端子选择(48、49、50)的设置,实现相应的7选1的分度位置,当电机准停后使能相应的分度端子,电机会查询分度位置状态表并以递增方式转到相应位置,此时可以查看P18.09。
(8)速度控制、位置控制与回零、分度的优先级
速度运行的优先级大于分度,系统运行在分度模式,只要使能主轴定向禁止,电机就会按照速度模式或位置模式运行。
回零优先级大于分度。
分度命令由分度端子从000状态至非000状态时有效,如000~011则主轴执行分度3,端子切换时的过渡时间需要小于10ms,否则有可能执行错误的分度指令。
(9)定位保持
定位过程中,位置环增益为P21.03,定位完成后的保持状态下位置环增益为P21.02。为保持足够的位置保持力并且系统不振荡,请调节P03.00、P03.01、P20.05、P21.02参数。
(10)定位命令选择(P22.00 的bit6)
电平信号:定位命令(回零及分度)需要有运行命令或者伺服使能才能执行。
(11)主轴参考点选择(P22.00 的bit0)
编码器Z脉冲定位支持以下主轴定位方式:
a) 编码器安装在电机轴上,电机轴与主轴为1:1刚性连接
b) 编码器安装在电机轴上,电机轴与主轴为1:1皮带连接
此时由于主轴高速运行时皮带可能打滑造成定位不准,建议在主轴上安装接近开关定位。
c) 编码器安装在主轴上,电机轴与主轴通过皮带连接,传动比可不为1:1
此时需要设置P20.06(电机与编码器减速比),而P22.14(主轴传动比)设为1。由于编码器未安装在电机上,会影响闭环矢量的控制性能。
接近开关定位支持以下主轴定位方式:
d) 编码器安装在电机轴上,电机轴与主轴传动比可不为1:1
此时需要设置P22.14(主轴传动比)。
5、 数字定位调试步骤
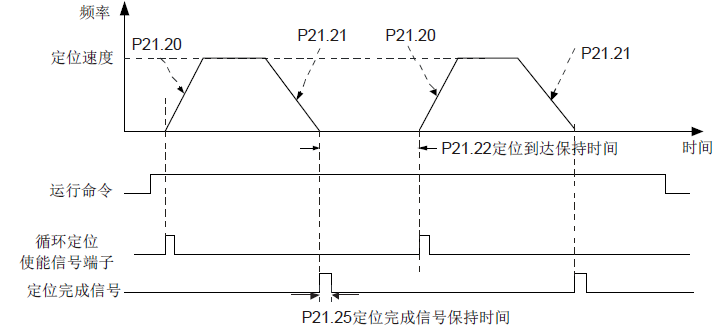
数字定位示意图如下所示:
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求。
(5)设置P21.00=0011使能数字定位。根据实际需要设置P21.17及P21.11 、P21.12,设定定位位移;设置P21.18、P21.19,设定定位速度;设置P21.20 、P21.21定位加、减速时间。
(6)单次定位操作
设置P21.16.bit1=0,电机就会按照步骤(5)中设置,完成单次定位动作,并保持在定位位置。
(7)循环定位操作
设置P21.16.bit1=1,使能循环定位。循环定位分为连续模式和往复模式。也可以通过端子功能(55号,数字定位循环使能)进行循环定位操作。
6、 光电开关定位调试步骤
光电开关定位就是在闭环矢量控制的基础上实现定位功能。
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求。
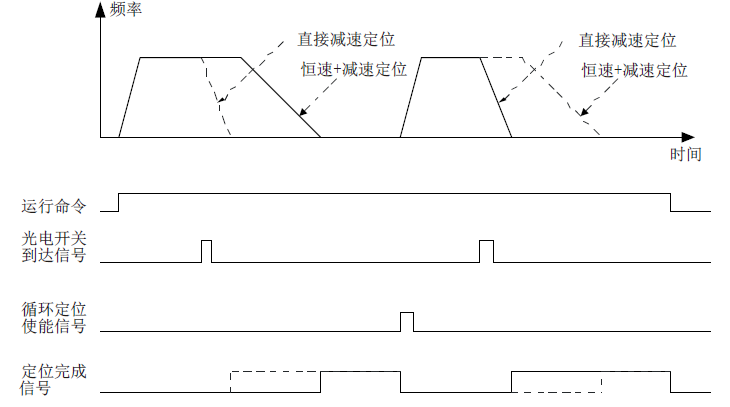
(5)设置P21.00=0021使能光电开关定位,光电开关信号只能接S8端子,并设置P05.08=43;并根据实际需要设置P21.17及P21.11、P21.12,设定定位位移;设置P21.21定位减速时间,但当前运行速度过大或设定定位位移过小时,定位减速时间失效,进入直接减速定位模式。
(6)循环定位操作
当定位完成时,电机保持在当前位置,通过对P05组输入端子功能选择(55:数字位置定位循环定位使能)的设置,实现循环定位的设置;当端子接收到循环定位使能信号(脉冲信号)时,电机按照速度模式以设定速度继续运行,遇到光电开关后,重新进入定位状态。
(7)定位保持
定位过程中,位置环增益为P21.03,定位完成后的保持状态下位置环增益为P21.02。为保持足够的位置保持力并且系统不振荡,请调节P03.00、P03.01、P20.05、P21.02参数。