5.5.10 模拟量输出
GD350 IP54系列标配1个模拟量输出端子(0~10V/0~20mA)和1个高速脉冲输出端子。模拟输出信号可以单独滤波,并可以通过设置最大、最小值及其对应输出的百分比来调节比例关系。模拟输出信号可以按一定的比例输出电机速度、输出频率、输出电流、电机转矩和电机功率等。
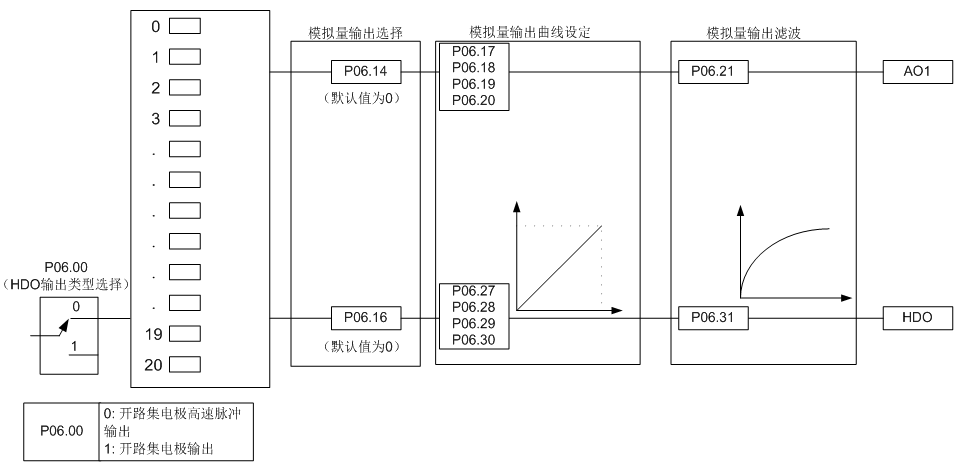
AO输出对应关系说明(输出值的最小值和最大值分别与脉冲或模拟量默认输出0.%和100.0%对应;
实际输出电压或脉冲频率与实际的百分比相对应,百分比通过功能码可设置。):
设定值 | 功能 | 说明 |
0 | 运行频率 | 0~最大输出频率 |
1 | 设定频率 | 0~最大输出频率 |
2 | 斜坡给定频率 | 0~最大输出频率 |
3 | 运行转速 | 0~最大输出频率对应的同步转速 |
4 | 输出电流(相对变频器) | 0~2倍变频器额定电流 |
5 | 输出电流(相对电机) | 0~2倍电机额定电流 |
6 | 输出电压 | 0~1.5倍变频器额定电压 |
7 | 输出功率 | 0~2倍电机额定功率 |
8 | 设定转矩值(双极性) | 0~2倍电机额定电流,负值默认对应0.0% |
9 | 输出转矩(绝对值) | 0~2倍电机额定转矩或0 ~ -2倍电机额定转矩 |
10 | 模拟AI1输入值 | 0~10V/0~20mA |
11 | 模拟AI2输入值 | 0V~10V,负值默认对应0.0% |
12 | 模拟AI3输入值 | 0~10V/0~20mA |
13 | 高速脉冲HDIA输入值 | 0.00~50.00kHz |
14 | Modbus通讯设定值1 | 0~1000 |
15 | Modbus通讯设定值2 | 0~1000 |
16 | PROFIBUS/CANopen/DeviceNet通讯设定值1 | 0~1000 |
17 | PROFIBUS/CANopen/DeviceNet通讯设定值2 | 0~1000 |
18 | 以太网通讯设定值1 | 0~1000 |
19 | 以太网通讯设定值2 | 0~1000 |
20 | 高速脉冲HDIA输入值 | 0.00~50.00kHz |
21 | EtherCAT/PROFINET通讯设定值1EtherCAT | 0~1000,负值默认对应0.0% |
22 | 转矩电流(双极性) | 0~3倍电机额定电流,负值默认对应0.0% |
23 | 励磁电流 | 0~3倍电机额定电流,负值默认对应0.0% |
24 | 设定频率(双极性) | 0~最大输出频率,负值默认对应0.0% |
25 | 斜坡给定频率(双极性) | 0~最大输出频率,负值默认对应0.0% |
26 | 运行转速(双极性) | 0~最大输出频率对应的同步转速,负值默认对应0.0% |
27 | EtherCAT/PROFINETEtherCAT通讯设定值2 | 0~1000 |
28 | 来自PLC卡的C_AO1 | 0~1000 |
29 | 来自PLC卡的C_AO2 | 0~1000 |
30 | 运行转速 | 0~2倍电机额定同步转速 |
31 | 输出转矩(双极性) | 0~2倍电机额定转矩,负值默认对应0.0% |
32~47 | 预留变量 |
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P06.00 | HDO输出类型选择 | 0:开路集电极高速脉冲输出 1:开路集电极输出 | 0 |
P06.14 | AO1输出选择 | 0:运行频率(0~最大输出频率) 1:设定频率(0~最大输出频率) 2:斜坡给定频率(0~最大输出频率) 3:运行转速(0~最大输出频率对应的同步转速) 4:输出电流(0~2倍变频器额定电流) 5:输出电流(0~2倍电机额定电流) 6:输出电压(0~1.5倍变频器额定电压) 7:输出功率(0~2倍电机额定功率) 8:设定转矩值(0~2倍电机额定电流) 9:输出转矩(绝对值,0~正负2倍电机额定转矩) 10:AI1输入值(0~10V/0~20mA) 11:AI2输入值(0~10V) 12:AI3输入值(0~10V/0~20mA) 13:HDIA输入值(0.00~50.00kHz) 14:ModbusMODBUS设定值1(0~1000) 15:ModbusMODBUS设定值2(0~1000) 16:PROFIBUS/CANopen/DeviceNet设定值1(0~1000) 17:PROFIBUS/CANopen/DeviceNet设定值2(0~1000) 18:以太网设定值1(0~1000) 19:以太网设定值2(0~1000) 20:HDIB输入值(0.00~50.00kHz) 21:EtherCAT/ProfinetPROFINET设定值1(0~1000) 22:转矩电流(双极性,0~3倍电机额定电流) 23:励磁电流(双极性,0~3倍电机额定电流) 24:设定频率(双极性,0~最大输出频率) 25:斜坡给定频率(双极性,0~最大输出频率) 26:运行转速(双极性,0~最大输出频率对应的同步转速) 27:EtherCAT/ProfinetPROFINET设定值(0~1000) 28:C_AO1(P27.00需为1,0~1000) 29:C_AO2(P27.00需为1,0~1000) 30:运行转速(0~2倍电机额定同步转速) 31:输出转矩(实际值,0~2倍电机额定转矩) 32~47:保留EtherCATEtherCAT | 0 |
P06.15 | 保留 | 0 | |
P06.16 | HDO高速脉冲输出选择 | 0 | |
P06.17 | AO1输出下限 | -300.0%~P06.19 | 0.0% |
P06.18 | 下限对应AO1输出 | 0.00V~10.00V | 0.00V |
P06.19 | AO1输出上限 | P06.17~300.0% | 100.0% |
P06.20 | 上限对应AO1输出 | 0.00V~10.00V | 10.00V |
P06.21 | AO1输出滤波时间 | 0.000s~10.000s | 0.000s |
P06.22~ P06.26 | 预留变量 | 0~65535 | 0 |
P06.27 | HDO输出下限 | -300.0%~P06.29 | 0.0% |
P06.28 | 下限对应HDO输出 | 0.00~50.00kHz | 0.0kHz |
P06.29 | HDO输出上限 | P06.27~300.0% | 100.0% |
P06.30 | 上限对应HDO输出 | 0.00~50.00kHz | 50.00kHz |
P06.31 | HDO输出滤波时间 | 0.000s~10.000s | 0.000s |
5.5.11 数字量输入
GD350 IP54系列标配4路可编程的数字输入端子和2路HDI输入端子。所有数字量输入端子功能全部可以通过功能码进行编程。HDI输入端子则可以通过功能码选择为高速脉冲输入端子或者是普通开关量输入端子;当选择为高速脉冲输入端子时,用户还可以通过设置来选择HDIA或HDIB高速脉冲输入作为频率给定、编码器信号输入。
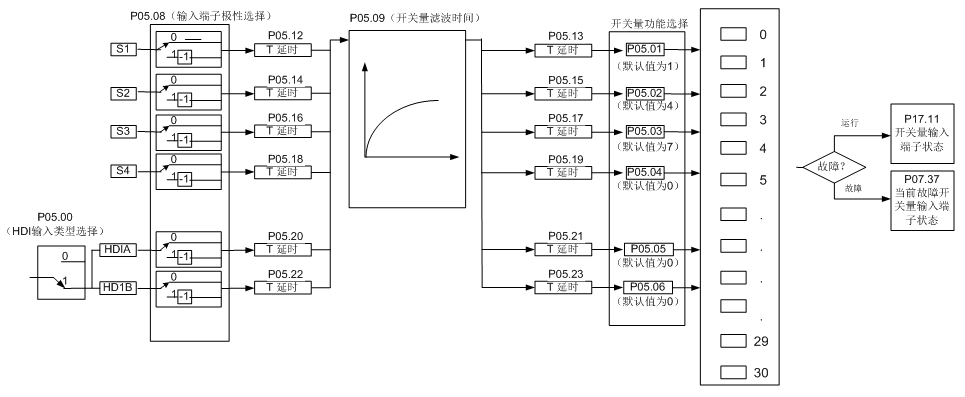
此参数用于设定数字多功能输入端子对应的功能。
注意:两个不同的多功能输入端子不能设置为同一功能。
设定值 | 功能 | 说明 |
0 | 无功能 | 即使有信号输入变频器也不动作。可将未使用的端子设定无功能防止误动作。 |
1 | 正转运行(FWD) | 通过外部端子来控制变频器正转与反转。 |
2 | 反转运行(REV) | |
3 | 三线式运行控制 | 通过此端子来确定变频器运行方式是三线控制模式。详细说明请参考P05.13三线制控制模式功能码介绍。 |
4 | 正转点动 | 点动运行时频率、点动加减速时间参见P08.06、P08.07、P08.08功能码的详细说明。 |
5 | 反转点动 | |
6 | 自由停车 | 变频器封锁输出,电机停车过程不受变频器控制。对于大惯量的负载而且对停车时间没有要求时,经常所采取这种方法。 与P01.08中的自由停车含义相同,主要适用于远程控制。 |
7 | 故障复位 | 外部故障复位功能,与键盘上的STOP/RST键复位功能相同。用此功能可实现远距离故障复位。 |
8 | 运行暂停 | 变频器减速停车,但所有运行参数均为记忆状态。如PLC参数、摆频参数、PID参数。此信号消失后,变频器恢复运行到停车前的状态。 |
9 | 外部故障输入 | 当外部故障信号送给变频器后,变频器报出故障并停机。 |
10 | 频率设定递增(UP) | 由外部端子给定频率时用来修改频率的递增指令、递减指令。
频率增减设定清除端子可以清除变频器内部UP/DOWN设定的辅助通道频率值,使给定频率恢复到仅由主给定频率指令通道给定的频率。 |
12 | 频率设定递减(DOWN) | |
12 | 频率增减设定清除 | |
13 | A设定与B设定切换 | 这功能主要实现频率设定通道之间的切换。 通过13号功能可以实现A频率给定通道和B频率给定通道之间的切换;通过14号功能可以实现由P00.09设定的组合设定通道与A频率给定通道之间的切换;通过15号功能可以实现由P00.09设定的组合设定通道与B频率给定通道之间的切换。 |
14 | 组合设定与A设定切换 | |
15 | 组合设定与B设定切换 | |
16 | 多段速端子1 | 通过四个端子的数字状态组合共可实现16段速的设定。 注意:多段速1为低位,多段速4为高位。 多段速4多段速3多段速2多段速1BIT3BIT2BIT1BIT0 |
17 | 多段速端子2 | |
18 | 多段速端子3 | |
19 | 多段速端子4 | |
20 | 多段速暂停 | 屏蔽多段速选择端子功能,使设定值维持在当前状态。 |
21 | 加减速时间选择1 | 通过此两个端子的状态组合来选择4组加减速时间: 端子1端子2加速或减速时间选择对应参数OFFOFF加减速时间1P00.11/P00.12ONOFF加减速时间2P08.00/P08.01OFFON加减速时间3P08.02/P08.03ONON加减速时间4P08.04/P08.05 |
22 | 加减速时间选择2 | |
23 | 简易PLC停机复位 | 重新开始简易PLC过程,清除以前的PLC状态记忆信息。 |
24 | 简易PLC暂停 | PLC在执行过程中程序暂停,以当前速度段一直运行,功能撤销后,简易PLC继续运行。 |
25 | PID控制暂停 | PID暂时失效,变频器维持当前频率输出。 |
26 | 摆频暂停(停在当前频率) | 变频器暂停在当前输出,功能撤销后,继续以当前频率开始摆频运行。 |
27 | 摆频复位(回到中心频率) | 变频器设定频率回到中心频率。 |
28 | 计数器复位 | 进行计数器状态清零。 |
29 | 速度和转矩控制切换 | 变频器从转矩控制模式切换到速度控制模式或从速度控制模式切换到转矩控制模式。 |
30 | 加减速禁止 | 保证变频器不受外来信号影响(停机命令除外),维持当前输出频率。 |
31 | 计数器触发 | 使能计数器脉冲计数。 |
33 | 频率增减设定暂时清除 | 当端子闭合时,可清除UP/DOWN设定的频率值,使给定频率恢复到由频率指令通道给定的频率,当端子断开时重新回到频率增减设定后的频率值。 |
34 | 直流制动 | 命令有效后,变频器立即开始直流制动。 |
35 | 电机1与电机2切换 | 该端子有效时,可以实现两个电机的切换控制。 |
36 | 命令切换到键盘 | 该功能端子有效时,则运行命令通道强制切换为键盘运行命令通道,该功能端子无效后运行命令通道恢复原状。 |
37 | 命令切换到端子 | 该功能端子有效时,则运行命令通道强制切换为端子运行命令通道,该功能端子无效后运行命令通道恢复原状。 |
38 | 命令切换到通讯 | 该功能端子有效时,则运行命令通道强制切换为通讯运行命令通道,该功能端子无效后运行命令通道恢复原状。 |
39 | 预励磁命令 | 该端子有效则启动电机预激磁,直至该端子无效。 |
40 | 用电量清零 | 命令有效后,变频器的用电量清零。 |
41 | 用电量保持 | 命令有效时,变频器的当前运行不影响变频器用电量。 |
42 | 转矩上限设定源切换到键盘设定 | 命令有效时,转矩上限由键盘设定 |
43 | 位置参考点输入 | 仅S1,S2,S3有效 |
44 | 主轴定向禁止 | 主轴定位功能无效 |
45 | 主轴回零/本地定位回零 | 触发进入主轴定位功能 |
46 | 主轴零点位置选择1 | 主轴零点位置通过端子选择1 |
47 | 主轴零点位置选择2 | 主轴零点位置通过端子选择2 |
48 | 主轴分度选择1 | 主轴分度值通过端子选择1 |
49 | 主轴分度选择2 | 主轴分度值通过端子选择2 |
50 | 主轴分度选择3 | 主轴分度值通过端子选择3 |
51 | 位置控制与速度控制切换端子 | 位置控制和速度控制切换 |
52 | 脉冲输入禁止 | 端子有效时,脉冲输入无效 |
53 | 位置偏差清除 | 清除位置环的输入偏差 |
54 | 位置比例增益切换 | 切换位置比例增益 |
55 | 数字位置定位循环定位使能 | 数字位置定位模式时有效,使能循环定位功能 |
56 | 紧急停止 | 命令有效时,电机按P1.25时间进行紧急减速停机 |
57 | 电机过温故障输入 | 电机过温故障输入时,电机故障停车 |
59 | FVC切换到空间电压矢量控制 | 在停机状态下,该端子有效,则切换到空间电压矢量控制。 |
60 | 切换到FVC控制 | 在停机状态下,该端子有效,则切换到FVC(闭环矢量)控制。 |
61 | PID极性切换 | 切换PID的输出极性,与P09.03结合使用 |
62 | 保留 | |
63 | 伺服使能 | P21.00的千位设置伺服使能时,伺服使能端子有效,控制变频器进入0伺服控制,此时,不需要起动命令。 |
64 | 正转极限限位 | 正转频率限幅 |
65 | 反转极限限位 | 反转频率限幅 |
66 | 编码器计数清零 | 位置计数值清零 |
67 | 脉冲递增 | 该端子功能有效,则脉冲输入按照P21.27脉冲速率递增 |
68 | 脉冲叠加使能 | 脉冲叠加使能后,脉冲递增和脉冲递减功能才有效 |
69 | 脉冲递减 | 该端子功能有效,则脉冲输入按照P21.27脉冲速率递减 |
70 | 电子齿轮选择 | 该端子有效,比例分子切换到P21.30第二指令比例分子 |
71 | 切换到主机 | 停机状态下,该端子有效,则切换到主机模式。 |
72 | 切换到从机 | 停机状态下,该端子有效,则切换到从机模式。 |
73~79 | 预留变量 |
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P05.00 | HDI输入类型选择 | 0x00~0x11 个位:HDIA输入类型选择 0:HDIA为高速脉冲输入 1:HDIA为开关量输入 十位:HDIB输入类型选择 0:HDIB为高速脉冲输入 1:HDIB为开关量输入 | 0x00 |
P05.01 | S1端子功能选择 | 0:无功能 1:正转运行 2:反转运行 3:三线式运行控制 4:正转寸动 5:反转寸动 6:自由停车 7:故障复位 8:运行暂停 9:外部故障输入 10:频率设定递增(UP) 11:频率设定递减(DOWN) 12:频率增减设定清除 13:A设定与B设定切换 14:组合设定与A设定切换 15:组合设定与B设定切换 16:多段速端子1 17:多段速端子2 18:多段速端子3 19:多段速端子4 20:多段速暂停 21:加减速时间选择1 22:加减速时间选择2 23:简易PLC停机复位 24:简易PLC暂停 25:PID控制暂停 26:摆频暂停 27:摆频复位 28:计数器复位 29:速度和转矩控制切换 30:加减速禁止 31:计数器触发 32:保留 33:频率增减设定暂时清除 34:直流制动 35:电机1切换电机2 36:命令切换到键盘 37:命令切换到端子 38:命令切换到通讯 39:预励磁命令 40:用电量清零 41:用电量保持 42:转矩上限设定源切换到键盘设定 43:位置参考点输入(仅S1,S2,S3有效) 44:主轴定向禁止 45:主轴回零/本地定位回零 46:主轴零点位置选择1 47:主轴零点位置选择2 48:主轴分度选择1 49:主轴分度选择2 50:主轴分度选择3 51:位置控制与速度控制切换端子 52:脉冲输入禁止 53:位置偏差清除 54:位置比例增益切换 55:数字位置定位循环定位使能 56:紧急停止 57:电机过温故障输入 59:切换到V/F控制 60:切换到FVC控制 61:PID极性切换 62:保留 63:伺服使能 64:正转极限限位 65:反转极限限位 66:编码器计数清零 67:脉冲递增 68:脉冲叠加使能 69:脉冲递减 70:电子齿轮选择 71:切换到主机 72:切换到从机 73~79:保留 | 1 |
P05.02 | S2端子功能选择 | 4 | |
P05.03 | S3端子功能选择 | 7 | |
P05.04 | S4端子功能选择 | 0 | |
P05.05 | HDIA端子功能选择 | 0 | |
P05.06 | HDIB端子功能选择 | 0 | |
P05.07 | 预留变量 | 0 | |
P05.08 | 输入端子极性选择 | 0x00~0x3F | 0x00 |
P05.09 | 开关量滤波时间 | 0.000~1.000s | 0.010s |
P05.10 | 虚拟端子设定 | 0x00~0x3F(0:禁止,1:使能) BIT0:S1虚拟端子 BIT1:S2虚拟端子 BIT2:S3虚拟端子 BIT3:S4虚拟端子 BIT4:HDIA虚拟端子 BIT8:HDIB虚拟端子 | 0x00 |
P05.11 | 端子控制运行模式 | 0:两线式控制1 1:两线式控制2 2:三线式控制1 3:三线式控制2 | 0 |
P05.12 | S1端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.13 | S1端子关断延时时间 | 0.000~50.000s | 0.000s |
P05.14 | S2端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.15 | S2端子关断延时时间 | 0.000~50.000s | 0.000s |
P05.16 | S3端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.17 | S3端子关断延时时间 | 0.000~50.000s | 0.000s |
P05.18 | S4端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.19 | S4端子关断延时时间 | 0.000~50.000s | 0.000s |
P05.20 | HDIA端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.21 | HDIA端子关断延时时间 | 0.000~50.000s | 0.000s |
P05.22 | HDIB端子闭合延时时间 | 0.000~50.000s | 0.000s |
P05.23 | HDIB端子关断延时时间 | 0.000~50.000s | 0.000s |
P07.39 | 最近故障输入端子状态 | 0 | |
P17.12 | 开关量输入端子状态 | 0 |
5.5.12 数字量输出
GD350 IP54系列标配2组继电器输出端子、1路开路集电极Y输出端子和1路高速脉冲输出(HDO)端子。所有数字量输出端子功能全部可以通过功能码进行编程。其中高速脉冲输出端子HDO还可以通过功能码选择设置为高速脉冲输出或者是开关量输出。
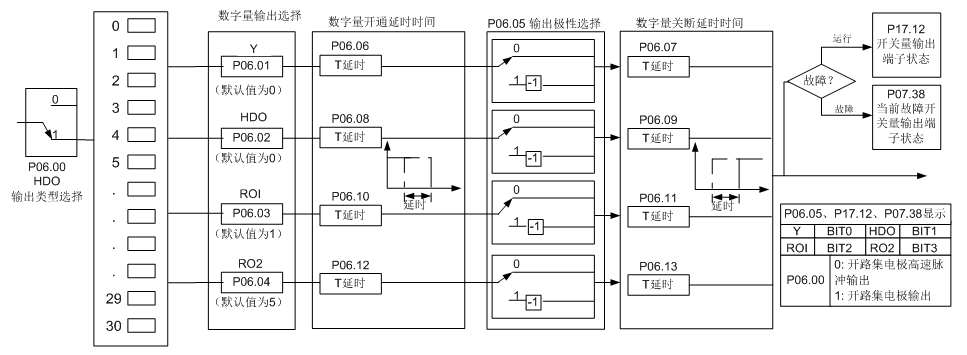
下表为以上四个功能参数的可选项,允许重复选取相同的输出端子功能。
设定值 | 功能 | 说明 |
0 | 无效 | 输出端子无任何功能 |
1 | 运行中 | 当变频器运行,有频率输出时,输出ON信号 |
2 | 正转运行中 | 当变频器正转运行,有频率输出时,输出ON信号 |
3 | 反转运行中 | 当变频器反转运行,有频率输出时,输出ON信号 |
4 | 点动运行中 | 当变频器点动运行,有频率输出时,输出ON信号 |
5 | 变频器故障 | 当变频器发生故障时,输出ON信号 |
6 | 频率水平检测FDT1 | 请参考功能码P08.32、P08.33的详细说明 |
7 | 频率水平检测FDT2 | 请参考功能码P08.34、P08.35的详细说明 |
8 | 频率到达 | 请参考功能码P08.36的详细说明 |
9 | 零速运行中 | 变频器输出频率与给定频率同为零时,输出ON信号 |
10 | 上限频率到达 | 运行频率到达上限频率时,输出ON信号 |
11 | 下限频率到达 | 运行频率到达下限频率时,输出ON信号 |
12 | 运行准备就绪 | 主回路和控制回路电源建立,变频器保护功能不动作,变频器处于可运行状态时,输出ON信号 |
13 | 预励磁中 | 变频器预励磁时,输出ON信号 |
14 | 过载预警 | 依据变频器预警点,在超过预警时间后,输出ON信号;具体参照功能码P11.08~P15.50中的说明 |
15 | 欠载预警 | 依据变频器预警点,在超过预警时间后,输出ON信号。具体参照功能码P15.51~P15.52中的说明 |
16 | 简易PLC阶段完成 | 当简易PLC当前阶段运转完成后,输出信号 |
17 | 简易PLC循环完成 | 当简易PLC运行完成一个循环后,输出信号 |
23 | Modbus通讯 虚拟端子输出 | 可以按照Modbus的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
24 | POROFIBUS/CANopen/DeviceNet通讯虚拟端子输出 | 根据PROFIBUS/CANopen的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
25 | 以太网通讯虚拟端子输出 | 根据以太网的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
26 | 直流母线电压建立完成 | 当母线电压达到逆变器欠压点以上时,输出有效 |
27 | z脉冲输出 | 编码器Z脉冲到达后输出有效,持续10毫秒后无效 |
28 | 脉冲叠加中 | 脉冲叠加端子输入功能有效时,输出有效 |
29 | STO动作 | 发生STO故障时输出 |
30 | 定位完成 | 位置控制定位完成,输出有效 |
31 | 主轴回零完成 | 主轴回零完成后,输出有效 |
32 | 主轴分度完成 | 主轴分度完成后,输出有效 |
33 | 速度极限中 | 频率限幅后输出有效 |
34 | EtherCAT/PROFITNET通讯虚拟端子输出 | 根据PROFITNET通讯的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
35 | 预留保留 | |
36 | 速度/位置控制切换完成 | 模式切换完成后输出有效 |
37~40 | 预留保留 | |
41 | C_Y1 | 来自PLC卡的C_Y1(P27.00需设置为1) |
42 | C_Y2 | 来自PLC卡的C_Y2(P27.00需设置为1) |
43 | C_HDO | 来自PLC卡的C_HDO(P27.00需设置为1) |
44 | C_RO1 | 来自PLC卡的C_RO1(P27.00需设置为1) |
45 | C_RO2 | 来自PLC卡的C_RO2(P27.00需设置为1) |
46 | C_RO3 | 来自PLC卡的C_RO3(P27.00需设置为1) |
47 | C_RO4 | 来自PLC卡的C_RO4(P27.00需设置为1) |
48~63 | 预留变量 |
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P06.00 | HDO输出类型选择 | 0:开路集电极高速脉冲输出 1:开路集电极输出 | 0 |
P06.01 | Y1输出选择 | 0:无效 1:运行中 2:正转运行中 3:反转运行中 4: 点动运行中 5:变频器故障 6:频率水平检测FDT1 7:频率水平检测FDT2 8:频率到达 9:零速运行中 10:上限频率到达 11:下限频率到达 12:运行准备就绪 13:预励磁中 14:过载预警 15:欠载预警 16:简易PLC阶段完成 17:简易PLC循环完成 18:设定记数值到达 19:指定记数值到达 20:外部故障有效 21:保留 22:运行时间到达 23:Modbus通讯虚拟端子输出 24:PROFIBUS/CANopen/DeviceNet通讯虚拟端子输出 25:以太网通讯虚拟端子输出 26:直流母线电压建立完成 27:z脉冲输出 28:脉冲叠加中 29:STO动作 30:定位完成 31:主轴回零完成 32:主轴分度完成 33:速度极限中 34:EtherCAT/PROFITNET通讯虚拟端子输出 35:保留 36:速度/位置控制切换完成 37:任意频率到达 38~40:保留 41:来自PLC卡的C_Y1(P27.00需设置为1) 42:来自PLC卡的C_Y2(P27.00需设置为1) 43:来自PLC卡的C_HDO(P27.00需设置为1) 44:来自PLC卡的C_RO1(P27.00需设置为1) 45:来自PLC卡的C_RO2(P27.00需设置为1) 46:来自PLC卡的C_RO3(P27.00需设置为1) 47:来自PLC的C_RO4(P27.00需设置为1) 48~63:保留 | 0 |
P06.02 | HDO输出选择 | 0 | |
P06.03 | 继电器RO1输出选择 | 1 | |
P06.04 | 继电器RO2输出选择 | 5 | |
P06.05 | 输出端子极性选择 | 0x00~0x0F | 0x00 |
P06.06 | Y开通延时时间 | 0.000~50.000s | 0.000s |
P06.07 | Y断开延时时间 | 0.000~50.000s | 0.000s |
P06.08 | HDO开通延时时间 | 0.000~50.000s(仅P06.00=1有效) | 0.000s |
P06.09 | HDO断开延时时间 | 0.000~50.000s(仅P06.00=1有效) | 0.000s |
P06.10 | 继电器RO1开通延时时间 | 0.000~50.000s | 0.000s |
P06.11 | 继电器RO1断开延时时间 | 0.000~50.000s | 0.000s |
P06.12 | 继电器RO2开通延时时间 | 0.000~50.000s | 0.000s |
P06.13 | 继电器RO2断开延时时间 | 0.000~50.000s | 0.000s |
P07.40 | 最近故障输出端子状态 | 0 | |
P17.13 | 开关量输出端子状态 | 0 |
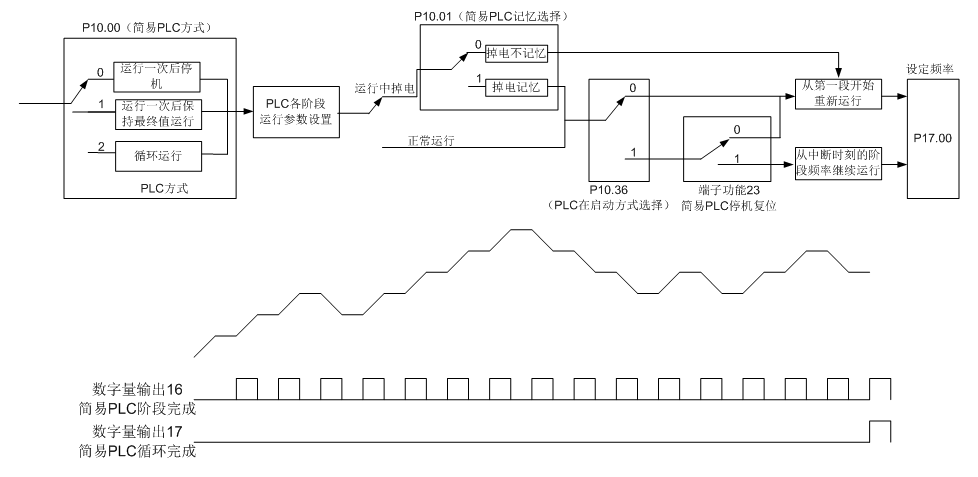
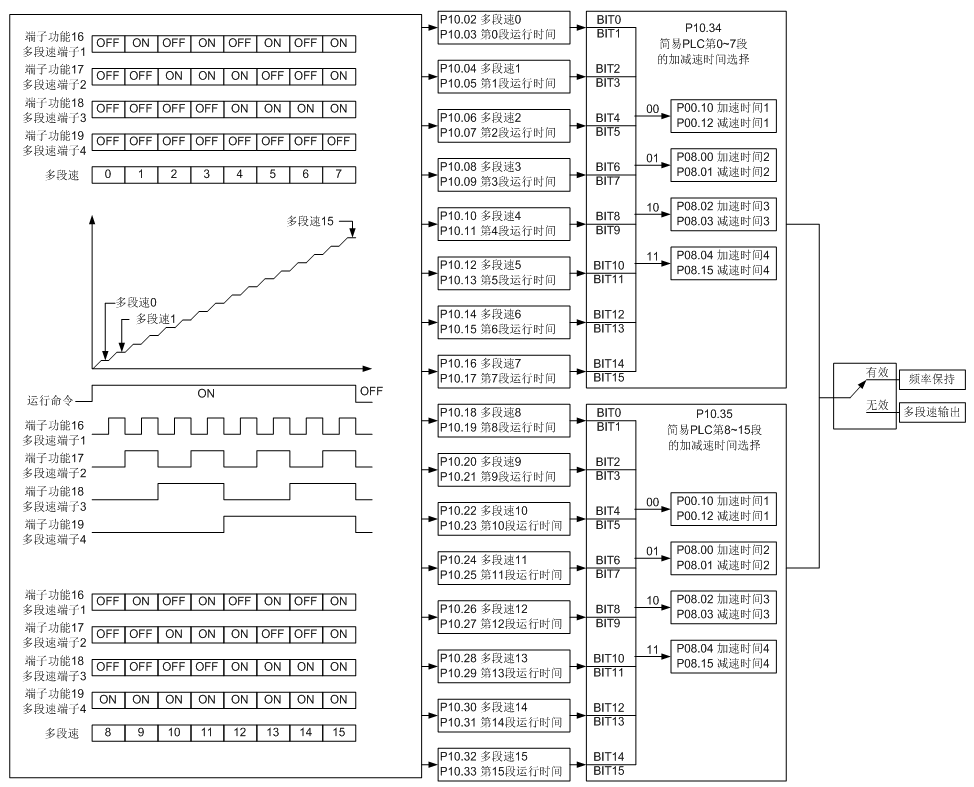
5.5.13 简易PLC
简易PLC功能是一个多段速度发生器,变频器可以根据运行时间自动变换运行频率、方向,以满足工艺要求。以前该功能需要外部PLC来辅助完成,现在依靠变频器本身就可以实现该功能。
本系列变频器可以实现16段速度控制,有4组加减速时间可供选择。
当所设定的PLC完成一个循环(或者是一段)后,可由多功能继电器输出一个ON信号。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P05.01~P05.06 | 数字量输入功能选择 | 23:简易PLC停机复位 24:简易PLC暂停 25:PID控制暂停 | |
P06.01~P06.04 | 数字量输出功能选择 | 16:简易PLC阶段到达 17:简易PLC循环到达 | |
P10.00 | 简易PLC方式 | 0:运行一次后停机 1:运行一次后保持最终值运行 2:循环运行 | 0 |
P10.01 | 简易PLC 记忆选择 | 0:掉电不记忆 1:掉电记忆 | 0 |
P10.02 | 多段速0 | -100.0~100.0% | 0.0% |
P10.03 | 第0段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.04 | 多段速1 | -100.0~100.0% | 0.0% |
P10.05 | 第1段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.06 | 多段速2 | -100.0~100.0% | 0.0% |
P10.07 | 第2段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.08 | 多段速3 | -100.0~100.0% | 0.0% |
P10.09 | 第3段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.10 | 多段速4 | -100.0~100.0% | 0.0% |
P10.11 | 第4段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.12 | 多段速5 | -100.0~100.0% | 0.0% |
P10.13 | 第5段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.14 | 多段速6 | -100.0~100.0% | 0.0% |
P10.15 | 第6段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.16 | 多段速7 | -100.0~100.0% | 0.0% |
P10.17 | 第7段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.18 | 多段速8 | -100.0~100.0% | 0.0% |
P10.19 | 第8段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.20 | 多段速9 | -100.0~100.0% | 0.0% |
P10.21 | 第9段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.22 | 多段速10 | -100.0~100.0% | 0.0% |
P10.23 | 第10段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.24 | 多段速11 | -100.0~100.0% | 0.0% |
P10.25 | 第11段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.26 | 多段速12 | -100.0~100.0% | 0.0% |
P10.27 | 第12段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.28 | 多段速13 | -100.0~100.0% | 0.0% |
P10.29 | 第13段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.30 | 多段速14 | -100.0~100.0% | 0.0% |
P10.31 | 第14段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.32 | 多段速15 | -100.0~100.0% | 0.0% |
P10.33 | 第15段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.36 | PLC再启动方式选择 | 0:从第一段开始重新运行 1:从中断时刻的阶段频率继续运行 | 0 |
P10.34 | 简易PLC第0~7段 的加减速时间选择 | 0x0000~0XFFFF | 0000 |
P10.35 | 简易PLC第8~15段 的加减速时间选择 | 0x0000~0XFFFF | 0000 |
P17.00 | 设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P17.27 | 简易PLC当前段数 | 显示简易PLC功能当前多段速段数 | 0 |
5.5.14 多段速运行
设定用变频器进行多段速度运行时参数。GD350 IP54系列变频器可设定16段速度,由多段速端子1~4的组合编码选择,分别对应多段速度0至多段速度15。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P05.01~P05.06 | 数字量输入功能选择 | 16:多段速端子1 17:多段速端子2 18:多段速端子3 19:多段速端子4 20:多段速暂停 | |
P10.02 | 多段速0 | -100.0~100.0% | 0.0% |
P10.03 | 第0段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.04 | 多段速1 | -100.0~100.0% | 0.0% |
P10.05 | 第1段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.06 | 多段速2 | -100.0~100.0% | 0.0% |
P10.07 | 第2段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.08 | 多段速3 | -100.0~100.0% | 0.0% |
P10.09 | 第3段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.10 | 多段速4 | -100.0~100.0% | 0.0% |
P10.11 | 第4段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.12 | 多段速5 | -100.0~100.0% | 0.0% |
P10.13 | 第5段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.14 | 多段速6 | -100.0~100.0% | 0.0% |
P10.15 | 第6段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.16 | 多段速7 | -100.0~100.0% | 0.0% |
P10.17 | 第7段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.18 | 多段速8 | -100.0~100.0% | 0.0% |
P10.19 | 第8段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.20 | 多段速9 | -100.0~100.0% | 0.0% |
P10.21 | 第9段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.22 | 多段速10 | -100.0~100.0% | 0.0% |
P10.23 | 第10段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.24 | 多段速11 | -100.0~100.0% | 0.0% |
P10.25 | 第11段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.26 | 多段速12 | -100.0~100.0% | 0.0% |
P10.27 | 第12段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.28 | 多段速13 | -100.0~100.0% | 0.0% |
P10.29 | 第13段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.30 | 多段速14 | -100.0~100.0% | 0.0% |
P10.31 | 第14段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.32 | 多段速15 | -100.0~100.0% | 0.0% |
P10.33 | 第15段运行时间 | 0.0~6553.5s(min) | 0.0s |
P10.34 | 简易PLC第0~7段 的加减速时间选择 | 0x0000~0XFFFF | 0000 |
P10.35 | 简易PLC第8~15段 的加减速时间选择 | 0x0000~0XFFFF | 0000 |
P17.27 | 简易PLC当前段数 | 显示简易PLC功能当前多段速段数 | 0 |
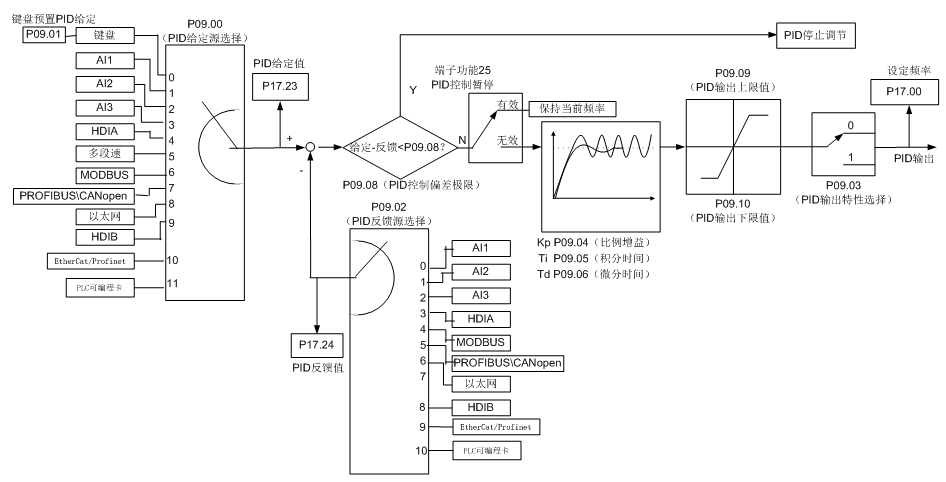
5.5.15 PID控制
PID控制是用于过程控制的一种常用方法,通过对被控量的反馈信号与目标量信号的差量进行比例、积分、微分运算,来调整变频器的输出频率或输出电压,构成负反馈系统,使被控量稳定在目标量上。适用于流量控制、压力控制及温度控制等过程控制。调整输出频率的基本原理框图如下:
PID控制工作原理简要和调节方法简单介绍:
比例调节(Kp):
当反馈与给定出现偏差时,输出与偏差成比例调节,若偏差恒定,则调节量也恒定。比例调节可以快速响应反馈的变化,但单纯用比例调节无法做到无差控制。比例增益越大,系统的调节速度越快,但若过大会出现振荡。调节方法为先将积分时间设很长,微分时间设为零,单用比例调节使系统运行起来,改变给定量的大小,观察反馈信号和给定量的稳定的偏差(静差),如果静差在给定量改变的方向上(例如增加给定量,系统稳定后反馈量总小于给定量),则继续增加比例增益,反之则减小比例增益,重复上面的过程,直到静差比较小。
积分时间(Ti):
当反馈与给定出现偏差时,输出调节量连续累加,如果偏差持续存在,则调节量持续增加,直到没有偏差。积分调节器可以有效地消除静差。积分调节器过强则会出现反复的超调,使系统一直不稳定,直到产生振荡。由于积分作用过强引起的振荡的特点是:反馈信号在给定量的上下摆动,摆幅逐步增大,直至振荡。积分时间参数的调节一般由大到小调,逐步调节积分时间,观察系统调节的效果,直到系统稳定的速度达到要求。
微分时间(Td):
当反馈与给定的偏差变化时,输出与偏差变化率成比例的调节量,该调节量只与偏差变化的方向和大小有关,而与偏差本身的方向和大小无关。微分调节的作用是在反馈信号发生变化时,根据变化的趋势进行调节,从而抑制反馈信号的变化。微分调节器请谨慎使用,因为微分调节容易放大系统的干扰,尤其是变化频率较高的干扰。
当频率指令选择(P00.06、P00.07)为7或者电压设定通道选择(P04.27)为6时,变频器运行模式为过程PID控制。
5.5.15.1 PID参数设定的一般步骤
a. 确定比例增益P
确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b. 确定积分时间Ti
比例增益P确定后,设定一个较大的积分时间数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c. 确定微分时间Td
微分时间Td一般不用设定,为0即可。
若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
d. 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
5.5.15.2 PID微调方法
设定PID控制的参数后,可以用以下的方法进行微调。
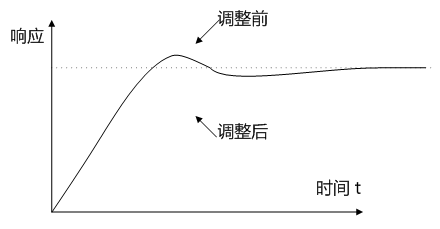
抑制超调:发生超调时,请缩短微分时间(Td),延长积分时间(Ti)。
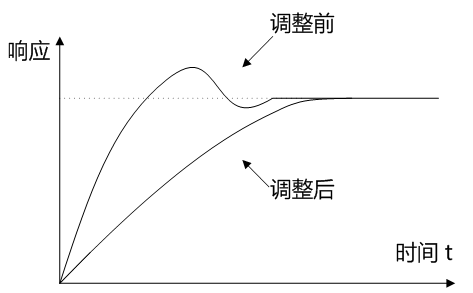
尽快使其达到稳定状态:即使发生超调,但要尽快稳定控制时,请缩短积分时间(Ti),延长微分时间(Td)。
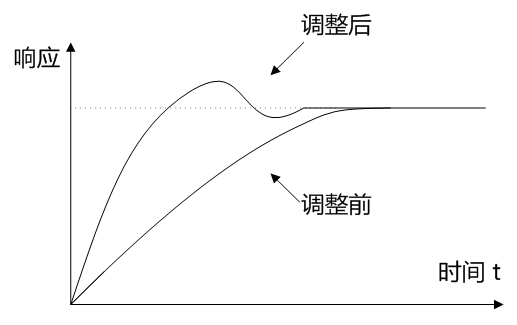
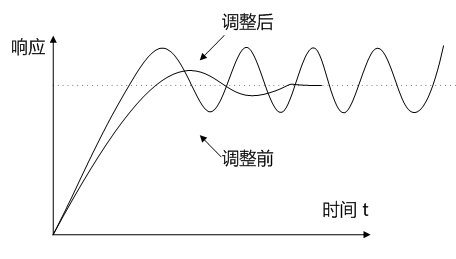
抑制周期较长的振动:如果周期性振动的周期比积分时间(Ti)的设定值还要长时,说明积分动作太强,延长积分时间(Ti)则可抑制振动。
抑制周期较短的振动:振动周期较短,振动周期与微分时间(Td)的设定值几乎相同,说明微分动作太强。如缩短微分时间(Td),则可抑制振动。当将微分时间(Td)设定为0.00(即无微分控制),也无法抑制振动时,请减小比例增益。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P09.00 | PID给定源选择 | 0:键盘定数字给定(P09.0 5.5:模拟通道AI1给定 2:模拟通道AI2给定 3:模拟通道AI3设定 4:高速脉冲HDIA设定 5:多段给定 6:Modbus通讯设定 7:PROFIBUS/CANopen/DevicneNET通讯设定 8:以太网通讯设定 9:高速脉冲HDIB设定 10:EtherCAT/PROFITNET通讯设定 11:可编程扩展卡设定 12:保留 | 0 |
P09.01 | 键盘预置PID给定 | -100.0%~100.0% | 0.0% |
P09.02 | PID反馈源选择 | 0:模拟通道AI1反馈 1:模拟通道AI2反馈 2:模拟通道AI3反馈 3:高速脉冲HDIA反馈 4:Modbus通讯反馈 5:PROFIBUS/CANopen/DevicneNET通讯设定 6:以太网通讯设定 7:高速脉冲HDIB反馈 8:EtherCAT/PROFITNET通讯设定 9:可编程扩展卡设定 10:保留 | 0 |
P09.03 | PID输出特性选择 | 0:PID输出为正特性 1:PID输出为负特性 | 0 |
P09.04 | 比例增益(Kp) | 0.00~100.00 | 1.80 |
P09.05 | 积分时间(Ti) | 0.05.50.00s | 0.90s |
P09.06 | 微分时间(Td) | 0.00~10.00s | 0.00s |
P09.07 | 采样周期(T) | 0.000~10.000s | 0.100s |
P09.08 | PID控制偏差极限 | 0.0~100.0% | 0.0% |
P09.09 | PID输出上限值 | P09.10~100.0%(最大频率或电压) | 100.0% |
P09.10 | PID输出下限值 | -100.0%~P09.09(最大频率或电压) | 0.0% |
P09.11 | 反馈断线检测值 | 0.0~100.0% | 0.0% |
P09.12 | 反馈断线检测时间 | 0.0~3600.0s | 1.0s |
P09.13 | PID调节选择 | 0x0000~0x5.51 个位: 0:频率到达上下限继续积分调节 1:频率到达上下限停止积分调节 十位: 0:与主给定方向一致 1:可与主给定方向相反 百位: 0:按照最大频率限幅 1:按照A频率限幅 千位: 0:A+B频率,主给定A频率源缓冲加减速无效 1:A+B频率,主给定A频率源缓冲加减速 有效,加减速由P08.04加速时间4确定 | 0x0001 |
P09.14 | 低频比例增益(Kp) | 0.00~100.00 | 1.00 |
P09.15 | PID指令加减速时间 | 0.0~1000.0s | 0.0s |
P09.16 | PID输出滤波时间 | 0.000~10.000s | 0.000s |
P09.17 | 保留 | -100.0~100.0% | 0.0% |
P09.18 | 低频积分时间(Ti) | 0.00~10.00s | 0.90s |
P09.19 | 低频微分时间(Td) | 0.00~10.00s | 0.00s |
P09.20 | PID参数切换低频点 | 0.00~P09.21 | 5.00Hz |
P09.21 | PID参数切换高频点 | P09.20~P00.04 | 10.00Hz |
P17.00 | 设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P17.23 | PID给定值 | -100.0~100.0% | 0.0% |
P17.24 | PID反馈值 | -100.0~100.0% | 0.0% |
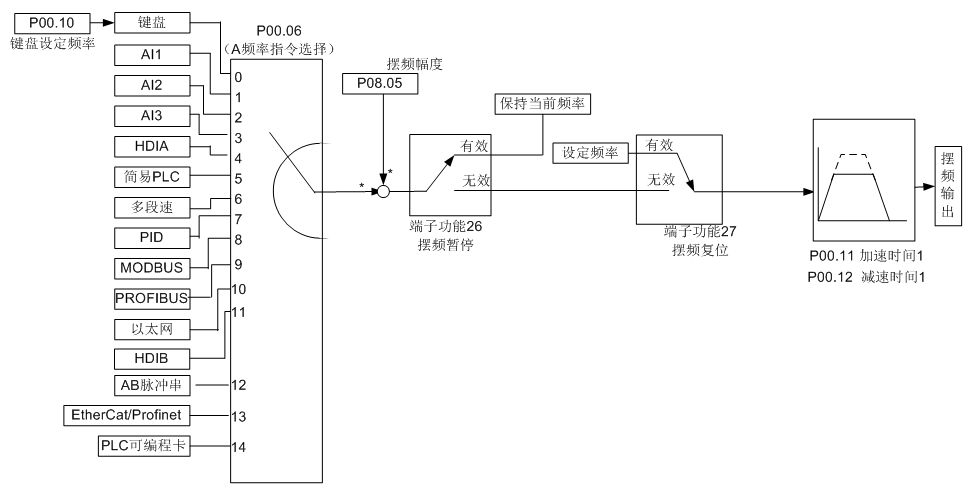
5.5.16 摆频运行
摆频适用于纺织、化纤等行业及需要横动、卷绕功能的场合,其典型工作如图所示:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.03 | 最大输出频率 | P00.03~400.00Hz | 50.00Hz |
P00.06 | A频率指令选择 | 0:键盘数字设定 1:模拟量AI1设定 2:模拟量AI2设定 3:模拟量AI3设定 4:高速脉冲HDIA设定 5:简易PLC程序设定 6:多段速运行设定 7:PID控制设定 8:Modbus通讯设定 9:PROFIBUS/CANopen/DeviceNet通讯设定 10:以太网通讯设定 11:高速脉冲HDIB设定 12:AB脉冲串 13:EtherCAT/PROFITNET通讯设定 14:可编程扩展卡 | 0 |
P00.11 | 加速时间1 | 0.0~3600.0s | 机型确定 |
P00.12 | 减速时间1 | 0.0~3600.0s | 机型确定 |
P05.01~P05.06 | 数字量输入功能选择 | 26:摆频暂停(停在当前频率) 27:摆频复位(回到中心频率) | |
P08.15 | 摆频幅度 | 0.0~100.0%(相对设定频率) | 0.0% |
P08.16 | 突跳频率幅度 | 0.0~50.0%(相对摆频幅度) | 0.0% |
P08.17 | 摆频上升时间 | 0.1~3600.0s | 5.0s |
P08.18 | 摆频下降时间 | 0.1~3600.0s | 5.0s |
5.5.17 本机编码器输入
GD350 IP54系列变频器支持脉冲计数功能,通过从HDI高速脉冲端口输入计数脉冲,当实际计数值大于等于设定计数值时,数字量输出端子将可以输出计数值到达脉冲信号,对应实际计数值自动清零。
功能码 | 名称 | 参数详细说明 | 缺省值 |
P05.00 | HDI输入类型选择 | 0x00~0x11 个位:HDIA输入类型选择 0:HDIA为高速脉冲输入 1:HDIA为开关量输入 十位:HDIB输入类型选择 0:HDIB为高速脉冲输入 1:HDIB为开关量输入 | 0x00 |
P05.38 | HDIA高速脉冲输入功能选择 | 0:频率设定输入 1:保留 2:编码器输入,需要配合HDIB使用 | 0 |
P05.44 | HDIB高速脉冲输入功能选择 | 0:频率设定输入 1:保留 2:编码器输入,需要配合HDIA使用 | 0 |
P20.15 | 测速方式选择 | 0:PG卡 1:本机,通过HDIA,HDIB实现,只支持增量式24V编码器 | 0 |
P18.00 | 编码器实测频率 | -999.9~3276.7Hz | 0.0Hz |
5.5.18 闭环矢量及位置控制和主轴定位功能调试步骤
1、异步机闭环矢量调试步骤
(1)通过键盘恢复出厂参数设置
(2)设置P00.03,P00.04,及P02组电机铭牌参数
(3)电机参数自学习
通过键盘进行旋转参数自学习或静止参数自学习,如果电机与负载可以脱开,则可以进行旋转参数自学习,否则进行静止参数自学习,自学习得到的参数,自动保存在P02组电机参数中。
(4)验证编码器是否安装及设置正确
a) 编码器方向确定及参数设置
设置编码器线数P20.01,设置P00.00=2,P00.10=20Hz,运行变频器,此时电机旋转为20Hz,观察P18.00的测速值是否正确,如果测速值为负,则表明编码器方向反向了,设置P20.02=1即可,如果测速值偏差较大,则表明P20.01设置错误。观察P18.02(编码器Z脉冲计数值)是否波动,如果波动,表明编码器有干扰或者P20.01设置错误,请检查接线及屏蔽层。
b) Z脉冲方向确定
设置P00.10=20Hz,P00.13(运行方向设定),分别设置正,反转观察P18.02的差值应小于5,如果通过设置P20.02的Z脉冲反向功能仍不能解决,则掉电将编码器A、B相对调,再观察P18.02的值正反转相差多大。Z脉冲方向只对采用Z脉冲进行主轴定位时的正反转定位精度有一定的影响。
(5)闭环矢量试运行
设置P00.00=3,进行闭环矢量控制,调整P00.10及P03组速度环及电流环PI参数,使之在整个范围内运行平稳。
(6)弱磁控制
可以设置弱磁调节器增益P03.26=0~8000,观察弱磁控制效果,P03.22~P03.24弱磁调节参数可根据需要调整。
2、同步机闭环矢量控制调试步骤
(1)设置P00.18=1,恢复出厂参数设置
(2)设置P00.00=3(闭环矢量控制),设置P00.03,P00.04,及P02组电机铭牌参数。
(3)设置P20.01编码器参数
当编码器为旋变编码器时,请设定编码器脉冲数为 (旋变极对数*1024),如4对极旋变,应设置P20.01=4096。
(4)验证编码器安装及设置是否正确
电机停止时, 观查P18.21(旋变角度)值应该不波动或波动很小,如果波动很大请检查接线及接地。缓慢旋转电机,P18.21应该缓慢变化,表明编码器接线正确;旋转多圈后P18.02值应该一直不变,且不为0,这表明编码器Z信号正确。
(5) 磁极初始位置自学习
设置P20.11=2或3(3为旋转自学习,2为静止自学习),按RUN键运行变频器。
a) 旋转自学习(P20.11=3)
自学习开始时检测当前磁极位置,然后加速到10Hz,学习编码器Z脉冲对应的磁极位置,然后减速停机。
运行过程中,如果出现ENC1O或者ENC1D故障,请设置P20.02=1,再重新进行自学习。
自学习完成后,学习得到的角度自动保存在P20.09,P20.10中。
b) 静止自学习
对于负载可脱离的场合,建议采用P20.11=3的旋转自学习,学习的角度精度比较高。如果负载不可脱离可以采用P20.11=2的自学习。自学习得到的磁极位置保存在P20.09,P20.10中。
(6)闭环矢量试运行
调整P00.10及P03组速度环及电流环PI参数,使之在整个范围内运行平稳。如果出现震荡,一般应调小速度环P03.00及P03.03的值,以及调小电流环P03.09,P03.10的值。在低速如果有电流振荡声,可调整低速滤波参数P20.05。
注意:更改电机线或编码器线后需要重新确定编码器的方向P20.02,同时需要重新进行磁极位置自学习。
3、脉冲串控制调试步骤
脉冲输入是基于闭环矢量控制进行操作的,后续的主轴定位、回零操作和分度操作都要用到速度检测。
(1)通过键盘恢复出厂参数设置
(2)设置P00.03,P00.04,及P02组电机铭牌参数
(3)电机参数自学习:旋转参数自学习或者静止参数自学习
(4)验证编码器是否安装及设置正确。设置P00.00=3,P00.10=20Hz并运行,检测系统的控制效果和性能。
(5)设置P21.00=0001将定位模式选择为位置控制即脉冲串控制,脉冲指令方式有4种,通过P21.01(脉冲指令方式)设置。
在位置控制模式下可以通过P18查看位置给定与反馈的高位和低位、Z脉冲计数值P18.02、编码器实测频率P18.00、脉冲指令频率P18.17、位置调节器输出P18.19,并从中可以看出位置参考点P18.08和Z脉冲计数值P18.02的关系,脉冲指令频率P18.17、脉冲指令前馈P18.18和位置调节器输出P18.19。
(6)位置调节器有两个增益P21.02,P21.03,可以通过速度指令、转矩指令、端子实现两个增益的切换。
(7)当P21.08位置控制器输出限幅设置0时,则位置控制无效,此时脉冲串作为频率源,P25.53位置前馈增益需设置为100%,速度加减速时间由脉冲串的加减速时间决定,系统的脉冲串加减速时间是可以调整的。如果用脉冲串作为频率源进行速度控制,也可以将P21.00设置为0000,然后将频率源给定P00.06或P00.07设置为12,AB脉冲串设定,此时加减速时间由变频器的加减速时间决定,同时AB脉冲串的参数设定依然由P21组参数设定。在速度模式下,AB脉冲串滤波时间由P21.29设定。
(8)脉冲串的输入频率与编码器脉冲的反馈频率相一致,可通过更改P25.51,P25.52电子齿轮比率系数来改变两者的对应关系。
(9)当运行命令有效或者伺服使能有效(通过设置P21.00或者端子功能63)时,进入脉冲串伺服运行模式。
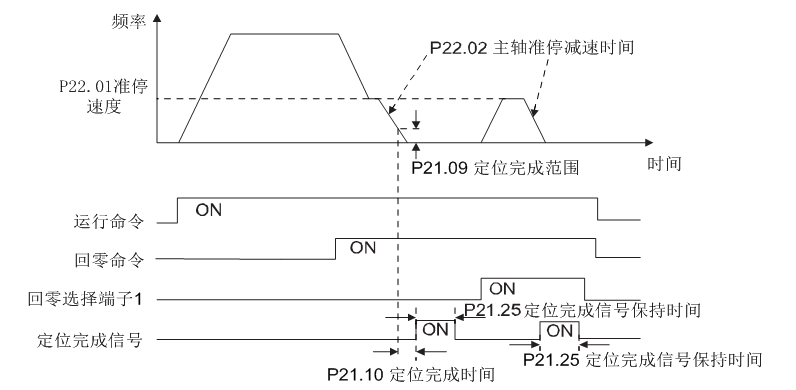
4、主轴定位调试步骤
主轴定位就是在闭环矢量控制的基础上实现回零、分度等准停功能。
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求,无论是在位置控制模式下还是速度控制模式下都能实现主轴定位功能。
(5)设置P22.00.bit0=1使能主轴定位,设置P22.00.bit1选择主轴零点输入,当系统采用编码器测速时设置P22.00.bit1=0选择Z脉冲输入,当系统采用光电开关测速时设置P22.00.bit5.5选择光电开关作为零点输入;设置P22.00.bit2选择零点搜索模式,设置P22.00.bit3使能或不使能零点校正,通过设置P22.00.bit7选择零点校正模式
(6)主轴回零操作
a) 通过设置P22.00.bit4选择定位方向
b) 在P22组中一共有4个零点位置,通过对P05组回零输入端子选择(46、47)的设置,实现4选1的回零位置,当执行回零功能时,电机按照设定的定位方向准停到相应的回零位置,通过P18.10可以查看。
c) 主轴回零的定位长度由准停减速时间和准停速度决定。
(7)主轴分度操作
在P22组中一共有7个分度位置,通过对P05组分度输入端子选择(48、49、50)的设置,实现相应的7选1的分度位置,当电机准停后使能相应的分度端子,电机会查询分度位置状态表并以递增方式转到相应位置,此时可以查看P18.09。
(8)速度控制、位置控制与回零、分度的优先级
速度运行的优先级大于分度,系统运行在分度模式,只要使能主轴定向禁止,电机就会按照速度模式或位置模式运行。
回零优先级大于分度。
分度命令由分度端子从000状态至非000状态时有效,如000~011则主轴执行分度3,端子切换时的过渡时间需要小于10ms,否则有可能执行错误的分度指令。
(9)定位保持
定位过程中,位置环增益为P21.03,定位完成后的保持状态下位置环增益为P21.02。为保持足够的位置保持力并且系统不振荡,请调节P03.00、P03.01、P20.05、P21.02参数。
(10)定位命令选择(P22.00 的bit6)
电平信号:定位命令(回零及分度)需要有运行命令或者伺服使能才能执行。
(11)主轴参考点选择(P22.00 的bit0)
编码器Z脉冲定位支持以下主轴定位方式:
a) 编码器安装在电机轴上,电机轴与主轴为5.5刚性连接
b) 编码器安装在电机轴上,电机轴与主轴为5.5皮带连接
此时由于主轴高速运行时皮带可能打滑造成定位不准,建议在主轴上安装接近开关定位。
c) 编码器安装在主轴上,电机轴与主轴通过皮带连接,传动比可不为5.5
此时需要设置P20.06(电机与编码器减速比),而P22.14(主轴传动比)设为1。由于编码器未安装在电机上,会影响闭环矢量的控制性能。
接近开关定位支持以下主轴定位方式:
a) 编码器安装在电机轴上,电机轴与主轴传动比可不为5.5
此时需要设置P22.14(主轴传动比)。
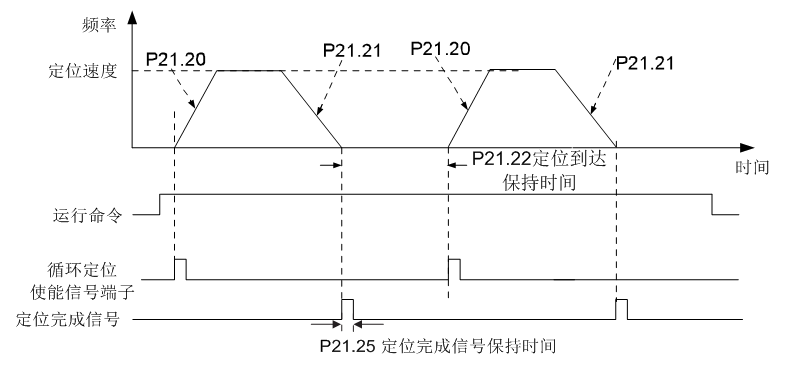
5、数字定位调试步骤
数字定位示意图如下所示:
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求。
(5)设置P21.00=0011使能数字定位。根据实际需要设置P25.57及P25.51 、P25.52,设定定位位移;设置P25.58、P25.59,设定定位速度;设置P21.20 、P21.21定位加、减速时间。
(6)单次定位操作
设置P25.56.bit1=0,电机就会按照步骤(5)中设置,完成单次定位动作,并保持在定位位置。
(7)循环定位操作
设置P25.56.bit5.5,使能循环定位。循环定位分为连续模式和往复模式。也可以通过端子功能(55号,数字定位循环使能)进行循环定位操作。
6、光电开关定位调试步骤
光电开关定位就是在闭环矢量控制的基础上实现定位功能。
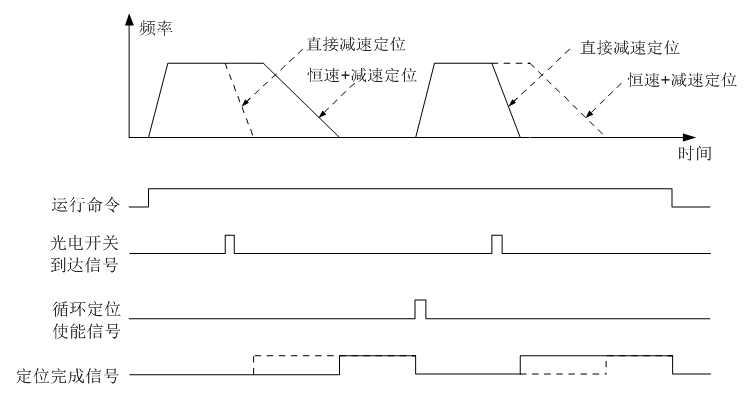
(1)~(4)这4步和闭环矢量控制调试的前4步一样,目的是达到闭环矢量控制的控制要求。
(5)设置P21.00=0021使能光电开关定位,光电开关信号只能接S8端子,并设置P05.08=43;并根据实际需要设置P25.57及P25.51、P25.52,设定定位位移;设置P21.21定位减速时间,但当前运行速度过大或设定定位位移过小时,定位减速时间失效,进入直接减速定位模式。
(6)循环定位操作
当定位完成时,电机保持在当前位置,通过对P05组输入端子功能选择(55:数字位置定位循环定位使能)的设置,实现循环定位的设置;当端子接收到循环定位使能信号(脉冲信号)时,电机按照速度模式以设定速度继续运行,遇到光电开关后,重新进入定位状态。
(7)定位保持
定位过程中,位置环增益为P21.03,定位完成后的保持状态下位置环增益为P21.02。为保持足够的位置保持力并且系统不振荡,请调节P03.00、P03.01、P20.05、P21.02参数。
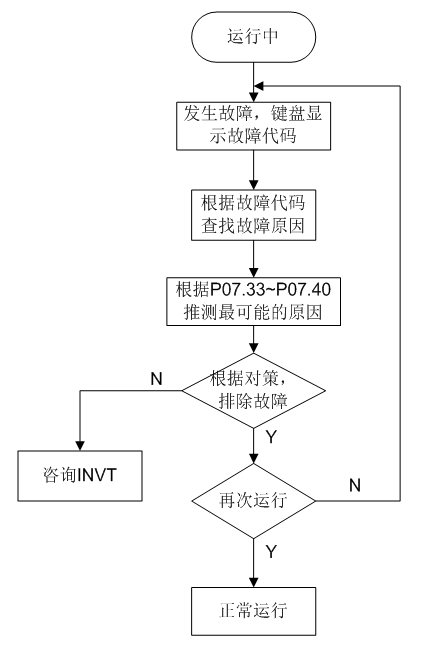
5.5.19 故障处理
GD350 IP54系列提供丰富故障处理信息,以方便用户的适用。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P07.27 | 最近故障类型 | 0:无故障 1:逆变单元U相保护(OUt1) 2:逆变单元V相保护(OUt2) 3:逆变单元W相保护(OUt3) 4:加速过电流(OC1) 5:减速过电流(OC2) 6:恒速过电流(OC3) 7:加速过电压(OV1) 8:减速过电压(OV2) 9:恒速过电压(OV3) 10:母线欠压故障(UV) 11:电机过载(OL 5.52:变频器过载(OL2) 13:输入侧缺相(SPI) 14:输出侧缺相(SPO) 15:整流模块过热(OH 5.56:逆变模块过热故障(OH2) 17:外部故障(EF) 18:485通讯故障(CE) 19:电流检测故障(ItE) 20:电机自学习故障(tE) 21:EEPROM操作故障(EEP) 22:PID反馈断线故障(PIDE) 23:制动单元故障(bCE) 24:运行时间达到(END) 25:电子过载(OL3) 26:键盘通讯错误(PCE) 27:参数上传错误(UPE) 28:参数下载错误(DNE) 29:PROFIBUS DP通讯故障(E-DP) 30:以太网通信故障(E-NET) 31:CANopen通信故障(E-CAN) 32:对地短路故障1(ETH1) 33:对地短路故障2(ETH2) 34:速度偏差故障(dEu) 35:失调故障(STo) 36:欠载故障(LL) 37:编码器断线故障(ENC1O) 38:编码器反向故障(ENC1D) 39:编码器Z脉冲断线故障(ENC1Z) 40:安全转矩停止(STO) 41:通道1安全回路异常(STL1) 42:通道2安全回路异常(STL2) 43:通道1和通道2同时异常(STL3) 44:安全代码FLASH CRC校验故障(CrCE) 45:PLC卡自定义故障1(P-E1) 46:PLC卡自定义故障2(P-E2) 47:PLC卡自定义故障3(P-E3) 48:PLC卡自定义故障4(P-E4) 49:PLC卡自定义故障5(P-E5) 50:PLC卡自定义故障6(P-E6) 51:PLC卡自定义故障7(P-E7) 52:PLC卡自定义故障8(P-E8) 53:PLC卡自定义故障9(P-E9) 54:PLC卡自定义故障10(P-E10) 55:扩展卡类型重复故障(E-Err) 56:编码器UVW丢失故障(ENCUV) 57:PROFITNET通信超时故障(E-PN) 58:CAN通信故障(SECAN) 59:电机过温故障(OT) 60:卡槽1卡识别失败(F1-Er) 61:卡槽2卡识别失败(F2-Er) 62:卡槽3卡识别失败(F3-Er) 63:卡槽1卡通信超时故障(C1-Er) 64:卡槽2卡通信超时故障(C2-Er) 65:卡槽3卡通信超时故障(C3-Er) 66:EtherCAT通信故障(E-CAT) 67:Bacnet通信故障(E-BAC) 68:DeviceNet通信故障(E-DEV) 69:主从同步CAN从机故障(S-Err) | 0 |
P07.28 | 前1次故障类型 | ||
P07.29 | 前2次故障类型 | ||
P07.30 | 前3次故障类型 | ||
P07.31 | 前4次故障类型 | ||
P07.32 | 前5次故障类型 | ||
P07.33 | 最近故障运行频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.34 | 最近故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.35 | 最近故障输出电压 | 0~1200V | 0V |
P07.36 | 最近故障输出电流 | 0.0~6300.0A | 0.0A |
P07.37 | 最近故障母线电压 | 0.0~2000.0V | 0.0V |
P07.38 | 最近故障时最高温度 | -20.0~120.0℃ | 0.0℃ |
P07.39 | 最近故障输入端子状态 | 0x0000~0xFFFF | 0 |
P07.40 | 最近故障输出端子状态 | 0x0000~0xFFFF | 0 |
P07.41 | 前1次故障运行频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.42 | 前1次故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.43 | 前1次故障输出电压 | 0~1200V | 0V |
P07.44 | 前1次故障输出电流 | 0.0~6300.0A | 0.0A |
P07.45 | 前1次故障母线电压 | 0.0~2000.0V | 0.0V |
P07.46 | 前1次故障时最高温度 | -20.0~120.0℃ | 0.0℃ |
P07.47 | 前1次故障输入端子状态 | 0x0000~0xFFFF | 0 |
P07.48 | 前1次故障输出端子状态 | 0x0000~0xFFFF | 0 |
P07.49 | 前2次故障运行频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.50 | 前2次故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz |
P07.51 | 前2次故障输出电压 | 0~1200V | 0V |
P07.52 | 前2次故障输出电流 | 0.0~6300.0A | 0.0A |
P07.53 | 前2次故障母线电压 | 0.0~2000.0V | 0.0V |
P07.54 | 前2次故障时温度 | -20.0~120.0℃ | 0.0℃ |
P07.55 | 前2次故障输入端子状态 | 0x0000~0xFFFF | 0 |
P07.56 | 前2次故障输出端子状态 | 0x0000~0xFFFF | 0 |