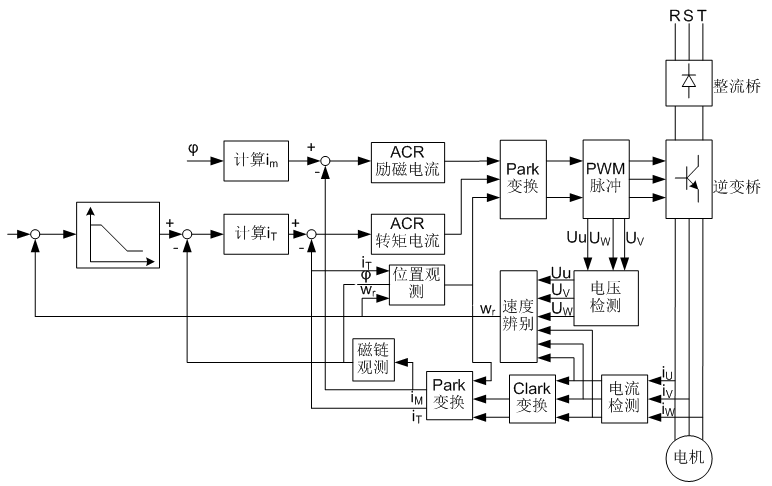
5.5.1 本节内容
本节介绍变频器内部各功能模块。
|
|

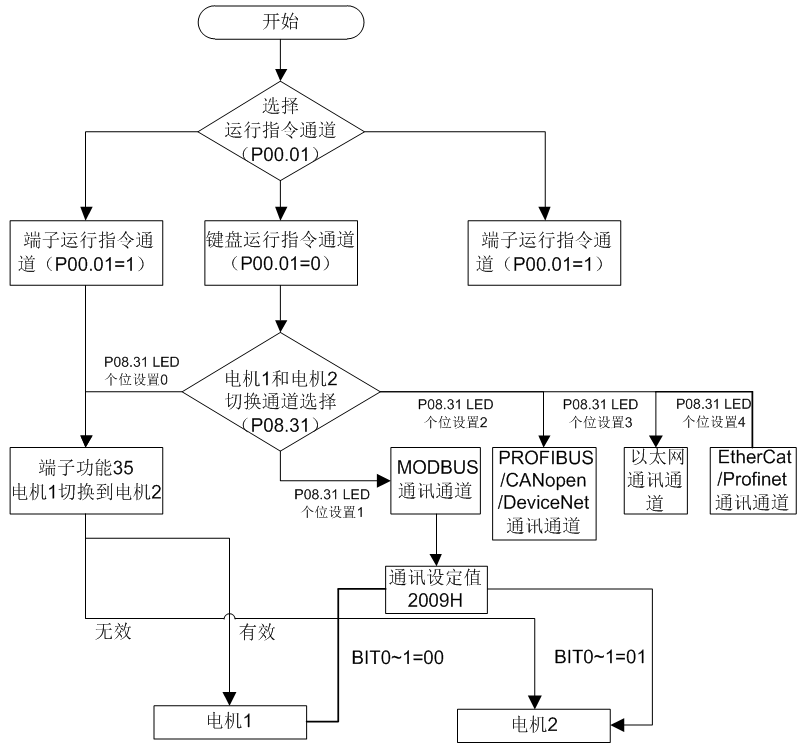
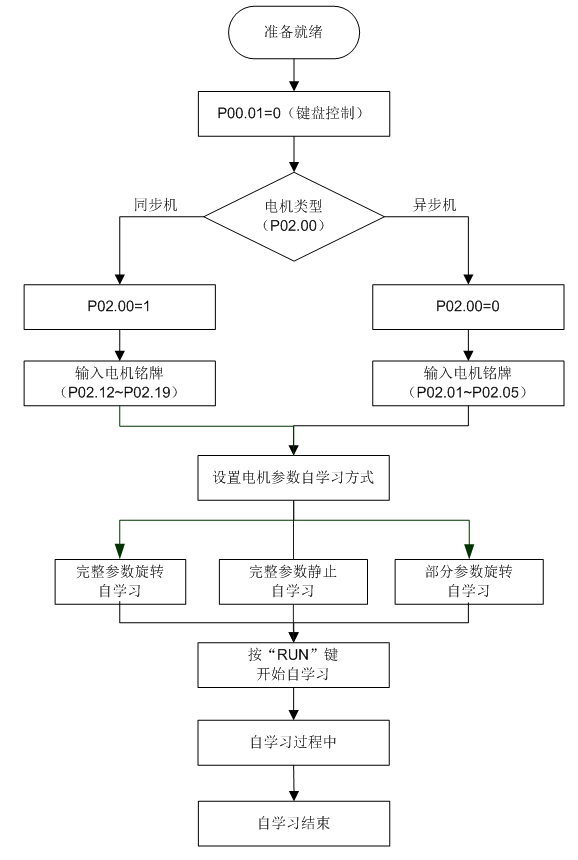
5.5.2 常规调试步骤
常规操作步骤如下图所示:(以电机1为例)
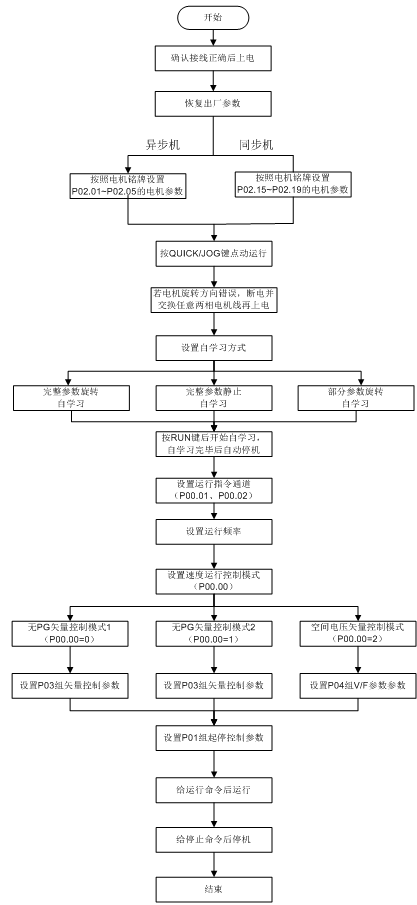
注意:如果发生故障,请按照“故障跟踪”判断发生原因,排除故障。
设置运行指令通道除了可以通过P00.01和P00.02设置之外,还可以通过端子命令设置。
当前运行指令通道 P00.01 | 多功能端子功能36 命令切换到键盘 | 多功能端子功能37 命令切换到端子 | 多功能端子功能38 命令切换到通讯 |
键盘运行指令通道 | / | 端子运行指令通道 | 通讯运行指令通道 |
端子运行指令通道 | 键盘运行指令通道 | / | 通讯运行指令通道 |
通讯运行指令通道 | 键盘运行指令通道 | 端子运行指令通道 | / |
注:“/”表示在对应当前给定通道下,该多功能端子功能无效。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.00 | 速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 |
P00.01 | 运行指令通道 | 0:键盘运行指令通道 1:端子运行指令通道 2:通讯运行指令通道 | 0 |
P00.02 | 通讯运行指令 通道选择 | 0:Modbus通讯通道 1:PROFIBUS通讯通道/CANopen通讯通道/DeviceNet通讯通道 2:以太网通讯通道 3:EtherCAT通讯通道/PROFITNET通讯通道 4:可编程扩展卡通信通道 5:无线通信卡通道 | 0 |
P00.15 | 电机参数自学习 | 0:无操作 1:旋转自学习1;进行电机参数的全面自学习,对控制精度要求比较高的场合建议使用旋转自学习方式。 2:静止自学习1(全面学习);适用于电机无法脱开负载的场合,对电机参数进行自学习。 3:静止自学习2(部分学习);当前电机为电机1时,只学习P02.06、P02.07、P02.08;当前电机为电机2时,只学习P12.06、P12.07、P12.08。 4:旋转自学习2:与旋转自学习1类似,但只对异步机有效。 5:静止自学习3(部分学习):只对异步机有效。 | 0 |
P00.18 | 功能参数恢复 | 0:无操作 1:恢复缺省值 2:清除故障档案 注意:所选功能操作完成后,该功能码自动恢复到0。恢复缺省值可以清除用户密码,请大家谨慎使用此功能。 | 0 |
P02.00 | 电机1类型 | 0:异步电机 1:同步电机 | 0 |
P02.01 | 异步电机1额定功率 | 0.1~3000.0kW | 机型确定 |
P02.02 | 异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.03 | 异步电机1额定转速 | 1~60000rpm | 机型确定 |
P02.04 | 异步电机1额定电压 | 0~1200V | 机型确定 |
P02.05 | 异步电机1额定电流 | 0.8~6000.0A | 机型确定 |
P02.15 | 同步电机1额定功率 | 0.1~3000.0kW | 机型确定 |
P02.16 | 同步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.17 | 同步电机1极对数 | 1~50 | 2 |
P02.18 | 同步电机1额定电压 | 0~1200V | 机型确定 |
P02.19 | 同步电机1额定电流 | 0.8~6000.0A | 机型确定 |
P05.01~P05.06 | 多功能数字量输入端子(S1~S4,HDIA,HDIB)功能选择 | 36:命令切换到键盘 37:命令切换到端子 38:命令切换到通讯 | |
P07.01 | 预留变量 | ||
P07.02 | QUICK/JOG键 功能选择 | 范围:0x00~0x27 个位:QUICK/JOG键功能选择 0:无功能 1:点动运行 2:保留 3:正转反转切换 4:清除UP/DOWN设定 5:自由停车 6:实现运行命令给定方式按顺序切换 7:保留 十位:保留 | 0x01 |
5.5.3 矢量控制
由于异步电机高阶、非线性、强耦合和多变量的系统特征,因而其实际控制非常困难,矢量控制理论主要是解决普通异步电机难于控制的一种控制方法,其主体的思想是:通过测量和控制异步电机的定子电流矢量,按照磁场定向的原则,将定子电流矢量分解为励磁电流(产生电机内部磁场的电流分量)和转矩电流(产生转矩的电流分量),分别对两个分量的幅值和相位进行控制(实际上就是对电机定子电流矢量的控制),实现励磁电流和转矩电流的解耦控制,最终实现异步电机的高性能调速。
GD350 IP54系列变频器内置了无速度传感器矢量控制算法,其可以同时驱动异步电机和永磁同步电机。由于矢量控制的核心算法基于准确的电机参数模型,电机参数的准确性将会对矢量控制的控制性能有所影响。因而在进行矢量运行之前,建议客户准确输入电机参数,并对电机进行参数自学习。
由于矢量控制算法比较复杂,进行内部参数调整时需要用户较高的理论水平,因而建议客户对矢量控制专用功能参数谨慎调整。
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.00 | 速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 |
P00.15 | 电机参数自学习 | 0:无操作 1:旋转自学习1;进行电机参数的全面自学习,对控制精度要求比较高的场合建议使用旋转自学习方式。 2:静止自学习1(全面学习);适用于电机无法脱开负载的场合,对电机参数进行自学习。 3:静止自学习2(部分学习);当前电机为电机1时,只学习P02.06、P02.07、P02.08;当前电机为电机2时,只学习P12.06、P12.07、P12.08。 4:旋转自学习2:与旋转自学习1类似,但只对异步机有效。 5:静止自学习3(部分学习):只对异步机有效。 | 0 |
P02.00 | 电机1类型 | 0:异步电机 1:同步电机 | 0 |
P03.00 | 速度环比例增益1 | 0~200.0 | 20.0 |
P03.01 | 速度环积分时间1 | 0.000~10.000s | 0.200s |
P03.02 | 切换低点频率 | 0.00Hz~P03.05 | 5.00Hz |
P03.03 | 速度环比例增益2 | 0~200.0 | 20.0 |
P03.04 | 速度环积分时间2 | 0.000~10.000s | 0.200s |
P03.05 | 切换高点频率 | P03.02~P00.03(最大输出频率) | 10.00Hz |
P03.06 | 速度环输出滤波 | 0~8(对应0~28/10ms) | 0 |
P03.07 | 矢量控制电动转差补偿系数 | 50%~200% | 100% |
P03.08 | 矢量控制制动转差补偿系数 | 50%~200% | 100% |
P03.09 | 电流环比例系数P | 0~65535 | 1000 |
P03.10 | 电流环积分系数I | 0~65535 | 1000 |
P03.32 | 转矩控制使能 | 0:禁止 1:使能 | 0 |
P03.11 | 转矩设定方式选择 | 1:键盘设定转矩(P03.12) 2:模拟量AI1设定转矩 3:模拟量AI2设定转矩 4:模拟量AI3设定转矩 5:脉冲频率HDIA设定转矩 6:多段转矩设定 7:Modbus通讯设定转矩 8:PROFIBUS/CANopen/DeviceNet通讯设定转矩 9:以太网通讯设定转矩 10:脉冲频率HDIB设定转矩 11:EtherCAT/PROFITNET通讯设定 12:可编程扩展卡设定 注意:设定方式2~6和10,100%对应于3倍的电机额定电流。 | 1 |
P03.12 | 键盘设定转矩 | -300.0%~300.0%(电机额定电流) | 50.0% |
P03.13 | 转矩给定滤波时间 | 0.000~10.000s | 0.010s |
P03.14 | 转矩控制 正转上限频率 设定源选择 | 0:键盘设定上限频率(P03.16) 1:模拟量AI1设定上限频率 2:模拟量AI2设定上限频率 3:模拟量AI3设定上限频率 4:脉冲频率HDIA设定上限频率 5:多段设定上限频率 6:Modbus通讯设定上限频率 7:PROFIBUS/CANopen/DeviceNet通讯设定上限频率 8:以太网通讯设定上限频率 9:脉冲频率HDIB设定上限频率 10:EtherCAT/PROFITNET通讯设定 11:可编程扩展卡设定 12:保留 注意:设定方式5.55.500%相对于最大频率。 | 0 |
P03.15 | 转矩控制 反转上限频率 设定源选择 | 0:键盘设定上限频率(P03.17设定) 5.51:同P03.14内容 | 0 |
P03.16 | 转矩控制 正转上限频率 键盘限定值 | 设定范围:0.00 Hz~P00.03(最大输出频率) | 50.00Hz |
P03.17 | 转矩控制 反转上限频率 键盘限定值 | 50.00Hz | |
P03.18 | 电动转矩上限 设定源选择 | 0:键盘设定转矩上限(P03.20) 1:模拟量AI1设定转矩上限 2:模拟量AI2设定转矩上限 3:模拟量AI3设定转矩上限 4:脉冲频率HDIA设定转矩上限 5:Modbus通讯设定转矩上限 6:PROFIBUS/CANopen/DeviceNet通讯设定转矩上限 7:以太网通讯设定转矩上限 8:脉冲频率HDIB设定转矩 9:EtherCAT/PROFITNET通讯设定 10:可编程扩展卡设定 11:保留 注意:设定方式2~4和8,100%相对于3倍电机电流。 | 0 |
P03.19 | 制动转矩上限 设定源选择 | 0:键盘设定转矩上限(P03.21设定值) 5.50:同P03.18内容 | 0 |
P03.20 | 电动转矩上限 键盘设定 | 0.0~300.0%(电机额定电流) | 180.0% |
P03.21 | 制动转矩上限 键盘设定 | 180.0% | |
P03.22 | 恒功区弱磁系数 | 0.1~2.0 | 0.3 |
P03.23 | 恒功区最小弱磁点 | 10%~100% | 20% |
P03.24 | 最大电压限制 | 0.0~120.0% | 100.0% |
P03.25 | 预激磁时间 | 0.000~10.000s | 0.300s |
P03.32 | 转矩控制使能 | 0:禁止 1:使能 | 0 |
P03.33 | 弱磁积分增益 | 0~8000 | 1200 |
P03.35 | 控制优化选择 | 0~0x5.51 个位:转矩指令选择 0:转矩给定 1:转矩电流给定 十位:保留 0:保留 1:保留 百位:速度环积分分离使能 0:不使能 1:使能 千位:保留 0:保留 1:保留 范围:0x0000~0x5.51 | 0x0000 |
P03.36 | 速度环微分增益 | 0.00~10.00s | 0.00s |
P03.37 | 高频电流环 比例系数 | 闭环矢量控制模式下(P00.00=3),在电流环高频切换点(P03.39)以下,电流环PI参数为P03.09、P03.10,在电流环高频切换点以上,电流环PI参数为P03.37、P03.38。 P03.37设定范围:0~65535 P03.38设定范围:0~65535 P03.39设定范围:0.0~100.0%(相对最大频率) | 1000 |
P03.38 | 高频电流环 积分系数 | 1000 | |
P03.39 | 电流环高频切换点 | 100.0% | |
P17.32 | 磁链 | 0.0~200.0% | 0.0% |
5.5.4 空间电压矢量控制模式
GD350 IP54系列变频器还内置了空间电压矢量控制功能,对于空间电压矢量控制可以用于各种控制精度要求不高的场合,对于一拖多的应用场合,也建议采用空间电压矢量控制模式。
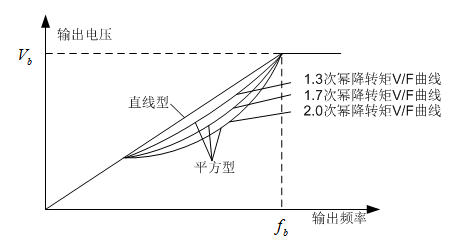
GD350 IP54系列变频器提供了多种V/F曲线模式选择,用户可以根据现场的需要来选择对应的V/F曲线,也可以根据自己的需求,来设置对应的V/F曲线。
建议:
1、 对于恒定力矩的负载,如直线运行的传送带等负载,由于其在整个运行过程中要求力矩恒定,所以选择直线型V/F曲线。
2、 对于递减力矩特性的负载,如风机、水泵等负载,由于其实际转矩与转速之间呈2次方或者是3次方的关系,因而可以选择对应的1.3、1.7或2次幂的V/F曲线。
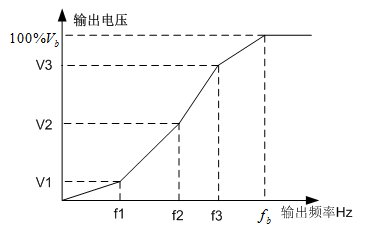
GD350 IP54系列变频器还提供了多点的V/F曲线,用户可以通过分别设置中间三点的电压和频率来改变变频器输出的V/F曲线,整个曲线由5点组成,起点为(0Hz、0V),终点为(电机基频、电机额定电压),在设置过程中要求:0≤f1≤f2≤f3≤电机基频;0≤V1≤V2≤V3≤电机额定电压。
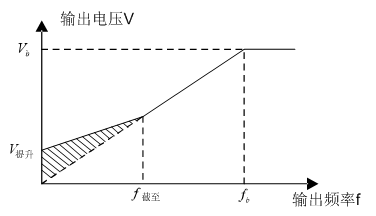
GD350 IP54系列变频器为空间电压矢量控制模式设置专用的功能码,通过设置可以有效提升空间电压矢量控制的性能:
(1)转矩提升
转矩提升功能,可以有效补偿空间电压矢量控制时的低速转矩性能,出厂缺省为自动转矩提升功能,由变频器根据实际的负载情况,自动调节转矩提升值。
注意:
1、 转矩提升只有在转矩提升截止频率之下才起作用;
2、 转矩提升过大,会引起电机的低频振动甚至过流故障发生,遇到这种情况请调小转矩提升值。
(2)节能运行
变频器在实际运行中,可以自动寻找效率最高点进行运行,使得变频器始终工作在效率最高的状态,达到节能的目的。
注意:
1、 该功能一般应用在轻载或者是空载运行比较多的场合。
2、 对于负载需要经常突变的场合,不适合选用该功能。
(3)V/F转差补偿增益
空间电压矢量控制属于开环模式,当电机负载突变时,会引起电机转速的波动,对于一些对速度要求比较高的场合,可以通过设置转差补偿增以来通过变频器内部调节输出的方式,补偿负载波动所引起的速度变化。
转差补偿增益的设定范围为:0~200%,其中100%对应额定转差频率。
注:额定转差频率=(电机额定同步转速-电机额定转速)*电机极对数/60
(4)振荡抑制
电机振荡是在大功率传动场合采用空间电压矢量控制模式运行时常常遇到的问题,为了解决这个问题,GD350 IP54系列增加了两个设置抑制振荡因子的功能码,用户可以根据发生振荡的频率来分别设置相对应的功能码。
注意:设置值越大抑制效果越明显,但是设置值过大也容易造成变频器输出电流过大等问题。
自定义V/F曲线(V/F分离)功能:
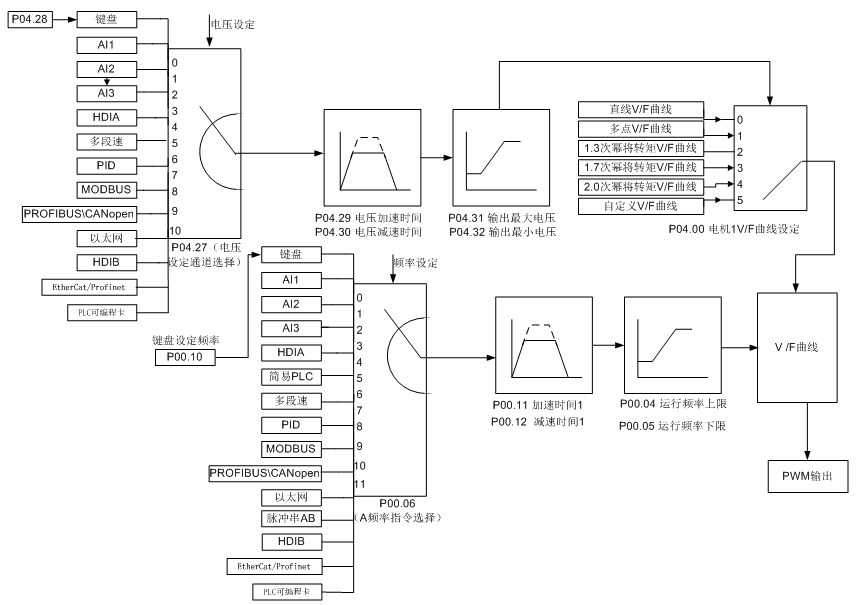
当用户选择GD350 IP54系列的自定义V/F曲线功能时,用户可以分别设定电压和频率的给定通道,以及对应电压和频率的加减速时间,由二者最终组合成实时的V/F曲线。
注意:这种V/F曲线分离的应用适用于各种变频电源的场合,但是用户在设置和调节参数时必须慎重,参数设置不当,可能引起机器损坏。
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.00 | 速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 |
P00.03 | 最大输出频率 | P00.04~400.00Hz | 50.00Hz |
P00.04 | 运行频率上限 | P00.05~P00.03 | 50.00Hz |
P00.05 | 运行频率下限 | 0.00Hz~P00.04 | 0.00Hz |
P00.11 | 加速时间1 | 0.0~3600.0s | 机型确定 |
P00.12 | 减速时间1 | 0.0~3600.0s | 机型确定 |
P02.00 | 电机1类型 | 0:异步电机 1:同步电机 | 0 |
P02.02 | 异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.04 | 异步电机1额定电压 | 0~1200V | 机型确定 |
P04.00 | 电机1 V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 |
P04.01 | 电机1转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% |
P04.02 | 电机1转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% |
P04.03 | 电机1 V/F频率点1 | 0.00Hz~P04.05 | 0.00Hz |
P04.04 | 电机1 V/F电压点1 | 0.0%~110.0% | 0.0% |
P04.05 | 电机1 V/F频率点2 | P04.03~ P04.07 | 0.00Hz |
P04.06 | 电机1 V/F电压点2 | 0.0%~110.0% | 0.0% |
P04.07 | 电机1 V/F频率点3 | P04.05~ P02.02或P04.05~ P02.16 | 0.00Hz |
P04.08 | 电机1 V/F电压点3 | 0.0%~110.0% | 0.0% |
P04.09 | 电机1 V/F转差补偿增益 | 0.0~200.0% | 100.0% |
P04.10 | 电机1低频抑制振荡因子 | 0~100 | 10 |
P04.11 | 电机1高频抑制振荡因子 | 0~100 | 10 |
P04.12 | 电机1抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz |
P04.13 | 电机2 V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 |
P04.14 | 电机2转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% |
P04.15 | 电机2转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% |
P04.16 | 电机2 V/F频率点1 | 0.00Hz~P04.18 | 0.00Hz |
P04.17 | 电机2 V/F电压点1 | 0.0%~110.0% | 0.0% |
P04.18 | 电机2 V/F频率点2 | P04.16~ P04.20 | 0.00Hz |
P04.19 | 电机2 V/F电压点2 | 0.0%~110.0% | 0.0% |
P04.20 | 电机2 V/F频率点3 | P04.18~ P02.02或P04.18~ P02.16 | 0.00Hz |
P04.21 | 电机2 V/F电压点3 | 0.0%~110.0% | 0.0% |
P04.22 | 电机2 V/F转差补偿增益 | 0.0~200.0% | 100.0% |
P04.23 | 电机2低频抑制振荡因子 | 0~100 | 10 |
P04.24 | 电机2高频抑制振荡因子 | 0~100 | 10 |
P04.25 | 电机2抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz |
P04.26 | 节能运行选择 | 0:不动作 1:自动节能运行 | 0 |
P04.27 | 电压设定通道选择 | 0:键盘设定电压;输出电压由P04.28决定。 1:AI1设定电压 2:AI2设定电压 3:AI3设定电压 4:HDIA设定电压 5:多段设定电压 6:PID设定电压 7:Modbus通讯设定电压 8:PROFIBUS/CANopen通讯设定电压 9:以太网通讯设定电压 10:HDIB设定电压 11:EtherCAT/PROFITNET通讯设定 12:可编程扩展卡设定 13:保留 | 0 |
P04.28 | 键盘设定电压值 | 0.0%~100.0%(电机额定电压) | 100.0% |
P04.29 | 电压增加时间 | 0.0~3600.0s | 5.0s |
P04.30 | 电压减少时间 | 0.0~3600.0s | 5.0s |
P04.31 | 输出最大电压 | P04.32~100.0%(电机额定电压) | 100.0% |
P04.32 | 输出最小电压 | 0.0%~P04.31(电机额定电压) | 0.0% |
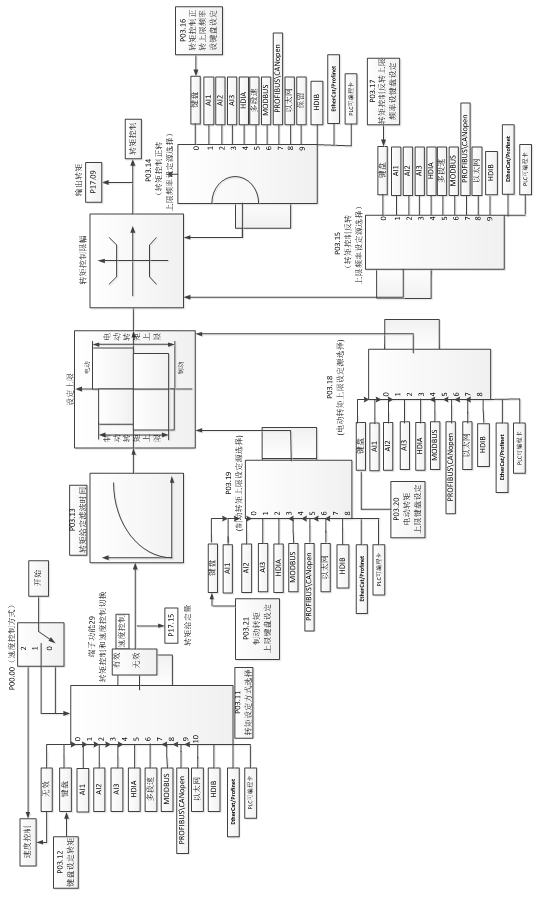
5.5.5 转矩控制
GD350 IP54系列变频器支持转矩控制和转速控制两种控制方式,转速控制的核心是整个控制以稳定速度为核心,确保设定速度与实际运行速度一致,同时最大带载能力受转矩限幅的限制;转矩控制的核心是整个控制以稳定转矩为核心,确保设定转矩与实际输出转矩一致,同时输出频率受速度上下限限制。
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.00 | 速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 |
P03.32 | 转矩控制使能 | 0:禁止 1:使能 | 0 |
P03.11 | 转矩设定方式选择 | 0:键盘设定转矩(P03.12) 1:键盘设定转矩(P03.12) 2:模拟量AI1设定转矩 3:模拟量AI2设定转矩 4:模拟量AI3设定转矩 5:脉冲频率HDIA设定转矩 6: 多段转矩设定 7:Modbus通讯设定转矩 8:PROFIBUS/CANopen/DeviceNet通讯设定转矩 9:以太网通讯设定转矩 10:脉冲频率HDIB设定转矩 11:EtherCAT/PROFITNET通讯设定 12:可编程扩展卡设定 注意:设定方式2~6和10,100%对应于3倍的电机额定电流。 | 0 |
P03.12 | 键盘设定转矩 | -300.0%~300.0%(电机额定电流) | 50.0% |
P03.13 | 转矩给定滤波时间 | 0.000~10.000s | 0.010s |
P03.14 | 转矩控制正转上限频率设定源选择 | 0:键盘设定上限频率(P03.16) 1:模拟量AI1设定上限频率 2:模拟量AI2设定上限频率 3:模拟量AI3设定上限频率 4:脉冲频率HDIA设定上限频率 5:多段设定上限频率 6:Modbus通讯设定上限频率 7:PROFIBUS/CANopen/DeviceNet通讯设定上限频率 8:以太网通讯设定上限频率 9:脉冲频率HDIB设定上限频率 10:EtherCAT/PROFITNET通讯设定 11:可编程扩展卡设定 12:保留 注意:设定方式5.55.500%相对于最大频率。 | 0 |
P03.15 | 转矩控制反转上限频率设定源选择 | 0:键盘设定上限频率(P03.17设定) 5.51:同P03.14内容 | 0 |
P03.16 | 转矩控制正转上限频率键盘限定值 | 0.00Hz~P00.03(最大输出频率) | 50.00 Hz |
P03.17 | 转矩控制反转上限频率键盘限定值 | 0.00Hz~P00.03(最大输出频率) | 50.00 Hz |
P03.18 | 电动转矩 上限设定源选择 | 0:键盘设定转矩上限(P03.20) 1:模拟量AI1设定转矩上限 2:模拟量AI2设定转矩上限 3:模拟量AI3设定转矩上限 4:脉冲频率HDIA设定转矩上限 5:Modbus通讯设定转矩上限 6:PROFIBUS/CANopen/DeviceNet通讯设定转矩上限 7:以太网通讯设定转矩上限 8:脉冲频率HDIB设定转矩 9:EtherCAT/PROFITNET通讯设定 10:可编程扩展卡设定 11:保留 注意:设定方式2~4和8,100%相对于3倍电机电流。 | 0 |
P03.19 | 制动转矩 上限设定源选择 | 0:键盘设定转矩上限(P03.21) 0:键盘设定转矩上限(P03.21设定值) 5.50:同P03.18内容EtherCAT | 0 |
P03.20 | 电动转矩 上限键盘设定 | 0.0~300.0%(电机额定电流) | 180.0% |
P03.21 | 制动转矩 上限键盘设定 | 0.0~300.0%(电机额定电流) | 180.0% |
P17.09 | 输出转矩 | -250.0~250.0% | 0.0% |
P17.15 | 转矩给定量 | -300.0~300.0%(电机额定电流) | 0.0% |
5.5.6 电机参数
|
|
|
|


GD350 IP54系列变频器既可以驱动异步电机,也可以驱动同步电机;且同时支持两套电机参数,可以通过多功能数字量输入端子或者是通讯方式来进行两套电机之间的切换。
变频器控制性能需基于所建立的精确的电机模型,因此在首次运行电机前,需要用户进行电机参数自学习(以电机1为例)。
注意:
1、 必须按照电机铭牌来正确设置电机参数。
2、 电机自学习时,选择旋转自学习时,必须将电机与负载脱开,使电机处于静止、空载状态,否则电机参数自学习的结果有可能不正确。此时,异步机可以学习P02.06~P02.10的参数;同步机可以学习P02.20~P02.23的参数。
3、 电机自学习时,选择静止自学习时,不必将电机与负载脱开,但是由于只学习了电机的部分参数,对控制性能有一定影响。此时,异步机可以学习P02.06~P02.10的参数;同步机可以学习P02.20~P02.22的参数,P02.23(同步电机1反电动势常数)可通过计算得出。
4、 电机自学习只能学习当前电机,如需学习另一电机的参数,请通过P08.31个位选择电机1和电机2的切换通道来切换当前电机。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.01 | 运行指令通道 | 0:键盘运行指令通道 1:端子运行指令通道 2:通讯运行指令通道 | 0 |
P00.15 | 电机参数自学习 | 0:无操作 1:旋转自学习1;进行电机参数的全面自学习,对控制精度要求比较高的场合建议使用旋转自学习方式。 2:静止自学习1(全面学习);适用于电机无法脱开负载的场合,对电机参数进行自学习。 3:静止自学习2(部分学习);当前电机为电机1时,只学习P02.06、P02.07、P02.08;当前电机为电机2时,只学习P12.06、P12.07、P12.08。 4:旋转自学习2:与旋转自学习1类似,但只对异步机有效。 5:静止自学习3(部分学习):只对异步机有效。 | 0 |
P02.00 | 电机1类型 | 0:异步电机 1:同步电机 | 0 |
P02.01 | 异步电机1额定功率 | 0.1~3000.0kW | 机型确定 |
P02.02 | 异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.03 | 异步电机1额定转速 | 1~60000rpm | 机型确定 |
P02.04 | 异步电机1额定电压 | 0~1200V | 机型确定 |
P02.05 | 异步电机1额定电流 | 0.8~6000.0A | 机型确定 |
P02.06 | 异步电机1定子电阻 | 0.001~65.535Ω | 机型确定 |
P02.07 | 异步电机1转子电阻 | 0.001~65.535Ω | 机型确定 |
P02.08 | 异步电机1漏感 | 0.1~6553.5mH | 机型确定 |
P02.09 | 异步电机1互感 | 0.1~6553.5mH | 机型确定 |
P02.10 | 异步电机1空载电流 | 0.1~6553.5A | 机型确定 |
P02.15 | 同步电机1额定功率 | 0.1~3000.0kW | 机型确定 |
P02.16 | 同步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.17 | 同步电机1极对数 | 1~50 | 2 |
P02.18 | 同步电机1额定电压 | 0~1200V | 机型确定 |
P02.19 | 同步电机1额定电流 | 0.8~6000.0A | 机型确定 |
P02.20 | 同步电机1定子电阻 | 0.001~65.535Ω | 机型确定 |
P02.21 | 同步电机1直轴电感 | 0.01~655.35mH | 机型确定 |
P02.22 | 同步电机1交轴电感 | 0.01~655.35mH | 机型确定 |
P02.23 | 同步电机1反电动势常数 | 0~10000 | 300 |
P05.01~P05.06 | 多功能数字量输入端子(S1~S4,HDIA,HDIB)功能选择 | 35:电机1切换到电机2 | |
P08.31 | 电机1和电机2切换选择 | 0x00~0x14 个位:切换通道选择 0:端子切换 1:Modbus通讯切换 2:PROFIBUS/CANopen/DeviceNet通讯切换 3:以太网通讯切换 4:EtherCAT/PROFITNET通讯切换 十位:运行中切换使能选择 0:运行中不可切换 1:运行中可切换 | 00 |
P12.00 | 电机2类型 | 0:异步电机 1:同步电机 | 0 |
P12.01 | 异步电机2额定功率 | 0.1~3000.0kW | 机型确定 |
P12.02 | 异步电机2额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P12.03 | 异步电机2额定转速 | 1~36000rpm | 机型确定 |
P12.04 | 异步电机2额定电压 | 0~1200V | 机型确定 |
P12.05 | 异步电机2额定电流 | 0.8~6000.0A | 机型确定 |
P12.06 | 异步电机2定子电阻 | 0.001~65.535Ω | 机型确定 |
P12.07 | 异步电机2转子电阻 | 0.001~65.535Ω | 机型确定 |
P12.08 | 异步电机2漏感 | 0.1~6553.5mH | 机型确定 |
P12.09 | 异步电机2互感 | 0.1~6553.5mH | 机型确定 |
P12.10 | 异步电机2空载电流 | 0.1~6553.5A | 机型确定 |
P12.15 | 同步电机2额定功率 | 0.1~3000.0kW | 机型确定 |
P12.16 | 同步电机2额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P12.17 | 同步电机2极对数 | 1~50 | 2 |
P12.18 | 同步电机2额定电压 | 0~1200V | 机型确定 |
P12.19 | 同步电机2额定电流 | 0.8~6000.0A | 机型确定 |
P12.20 | 同步电机2定子电阻 | 0.001~65.535Ω | 机型确定 |
P12.21 | 同步电机2直轴电感 | 0.01~655.35mH | 机型确定 |
P12.22 | 同步电机2交轴电感 | 0.01~655.35mH | 机型确定 |
P12.23 | 同步电机1反电动势常数 | 0~10000 | 300 |
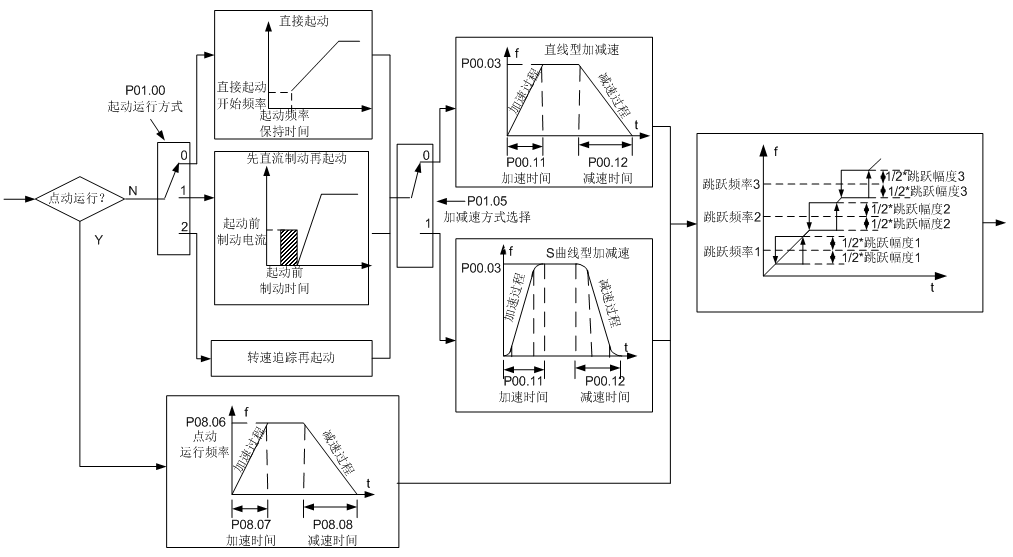
5.5.7 起停控制
变频器的起停控制包括三种不同的状态:变频器正常上电后给运行命令起动、变频器停电再起动功能有效后起动、变频器故障自动复位后起动,下面分别针对这三种不同的起停控制状态进行说明。
变频器的起动方式一共有三种,分别对应为:直接从启动频率起动、先直流制动再起动、转速跟踪后再起动。用户可以根据不同的现场工况,选择满足要求的起动方式。
对于大惯性的负载,特别是可能会产生反转的场合,可以选择先直流制动再起动,或者是转速追踪再起动。
注意:建议用户使用直接起动方式驱动同步电机。
1、 变频器正常上电后给运行命令启动逻辑框图
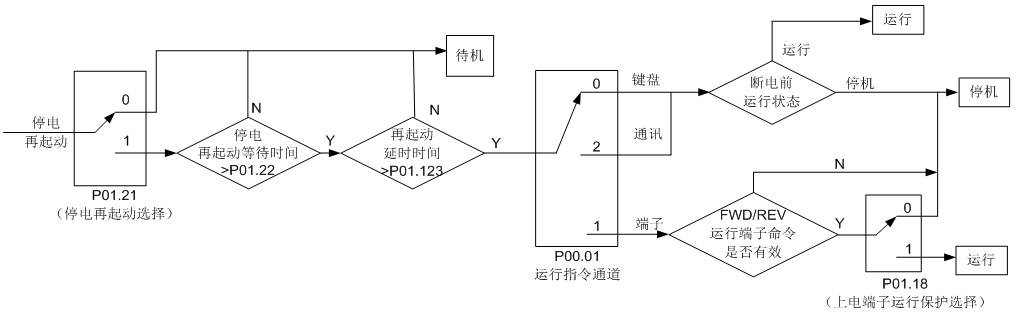
2、 变频器停电再启动逻辑框图
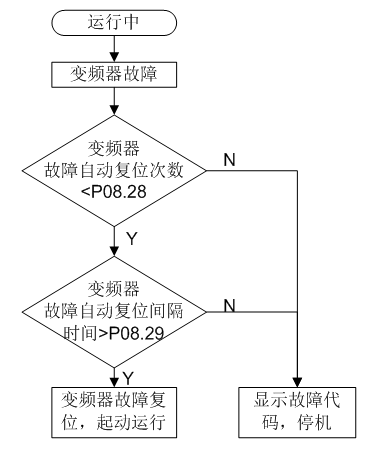
3、 变频器故障自动复位后再起动逻辑框图
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.01 | 运行指令通道 | 0:键盘运行指令通道 1:端子运行指令通道 2:通讯运行指令通道 | 0 |
P00.11 | 加速时间1 | 0.0~3600.0s | 机型确定 |
P00.12 | 减速时间1 | 0.0~3600.0s | 机型确定 |
P01.00 | 起动运行方式 | 0:直接起动 1:先直流制动再起动 2:转速追踪再起动1 3:转速追踪再起动2 | 0 |
P01.01 | 直接起动开始频率 | 0.00~50.00Hz | 0.50Hz |
P01.02 | 起动频率保持时间 | 0.0~50.0s | 0.0s |
P01.03 | 起动前直流制动电流 | 0.0~100.0% | 0.0% |
P01.04 | 起动前直流制动时间 | 0.00~50.00s | 0.00s |
P01.05 | 加减速方式选择 | 0:直线型 1:S曲线型 注:选择1时,需要配合设置P01.06、P01.07、P01.27、P01.28功能码 | 0 |
P01.08 | 停机方式选择 | 0:减速停车 1:自由停车 | 0 |
P01.09 | 停机制动开始频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P05.50 | 停机制动等待时间 | 0.00~50.00s | 0.00s |
P05.51 | 停机直流制动电流 | 0.0~100.0% | 0.0% |
P05.52 | 停机直流制动时间 | 0.00~50.00s | 0.00s |
P05.53 | 正反转死区时间 | 0.0~3600.0s | 0.0s |
P05.54 | 正反转切换模式 | 0:过零频切换 1:过起动频率切换 2:经停机速度并延时再切换 | 0 |
P05.55 | 停止速度 | 0.00~100.00Hz | 0.50 Hz |
P05.56 | 停止速度检出方式 | 0:速度设定值(空间电压矢量控制模式下只有这一种检测方式) 1:速度检测值 | 1 |
P05.58 | 上电端子 运行保护选择 | 0:上电时端子运行命令无效 1:上电时端子运行命令有效 | 0 |
P05.59 | 运行频率低于频率下限动作(频率下限大于0有效) | 0:以频率下限运行 1:停机 2:休眠待机 | 0 |
P01.20 | 休眠恢复延时时间 | 0.0~3600.0s(对应P05.59为2有效) | 0.0s |
P01.21 | 停电再起动选择 | 0:禁止再起动 1:允许再起动 | 0 |
P01.22 | 停电再起动等待时间 | 0.0~3600.0s(对应P01.25.5有效) | 1.0s |
P01.23 | 起动延时时间 | 0.0~60.0s | 0.0s |
P01.24 | 停止速度延迟时间 | 0.0~100.0s | 0.0s |
P01.25 | 开环0Hz输出选择 | 0:无电压输出 1:有电压输出 2:按停机直流制动电流输出 | 0 |
P01.26 | 紧急停止减速时间 | 0.0~60.0s | 2.0s |
P01.27 | 减速过程S曲线开始段时间 | 0.0~50.0s | 0.1s |
P01.28 | 减速过程S曲线结束段时间 | 0.0~50.0s | 0.1s |
P01.29 | 短路制动电流 | 0.0~150.0%(变频器额定电流) | 0.0% |
P01.30 | 启动短路制动保持时间 | 0.00~50.00s | 0.00s |
P01.31 | 停机短路制动保持时间 | 0.00~50.00s | 0.00s |
P01.32 | 点动预励磁时间 | 0~10.000s | 0.000s |
P01.33 | 点动停机制动开始频率 | 0~P00.03 | 0.00Hz |
P01.34 | 休眠进入延时时间 | 0~3600.0s | 0.0s |
P05.01~P05.06 | 数字量输入功能选择 | 1:正转运行 2:反转运行 4:正转寸动 5:反转寸动 6:自由停车 7:故障复位 8:运行暂停 21:加减速时间选择1 22:加减速时间选择2 30:加减速禁止 | |
P08.06 | 点动运行频率 | 0.00Hz~P00.03(最大输出频率) | 5.00Hz |
P08.07 | 点动运行加速时间 | 0.0~3600.0s | 机型确定 |
P08.08 | 点动运行减速时间 | 0.0~3600.0s | 机型确定 |
P08.00 | 加速时间2 | 0.0~3600.0s | 机型确定 |
P08.01 | 减速时间2 | 0.0~3600.0s | 机型确定 |
P08.02 | 加速时间3 | 0.0~3600.0s | 机型确定 |
P08.03 | 减速时间3 | 0.0~3600.0s | 机型确定 |
P08.04 | 加速时间4 | 0.0~3600.0s | 机型确定 |
P08.05 | 减速时间4 | 0.0~3600.0s | 机型确定 |
P08.19 | 加减速时间切换频率 | 0.00~P00.03(最大频率) 0.00Hz:不切换 大于P08.19切换到加减速时间2 | 0 |
P08.21 | 加减速时间基准频率 | 0:最大输出频率 1:设定频率 2:100Hz 注:只对直线加减速有效 | 0 |
P08.28 | 故障自动复位次数 | 0~10 | 0 |
P08.29 | 故障自动复位间隔时间设置 | 0.1~3600.0s | 1.0s |
5.5.8 频率设定
GD350 IP54系列的变频器频率给定有很多种方式,其给定通道可以分为主给定通道和辅助给定通道两种形式。
主给定通道有两个:A频率给定通道和B频率给定通道;两个给定通道可以进行相互之间的简易数学运算;通过设定的多功能端子也可以进行不同给定通道之间的动态切换。
辅助给定通道有一种输入方式:端子UP/DOWN开关输入等效为变频器内部的辅助给定输入UP/DOWN给定,用户可以通过设置功能码使能对应的给定方式和该给定方式对变频器频率给定的作用。
变频器实际给定由主给定通道和辅助给定通道相加而成。
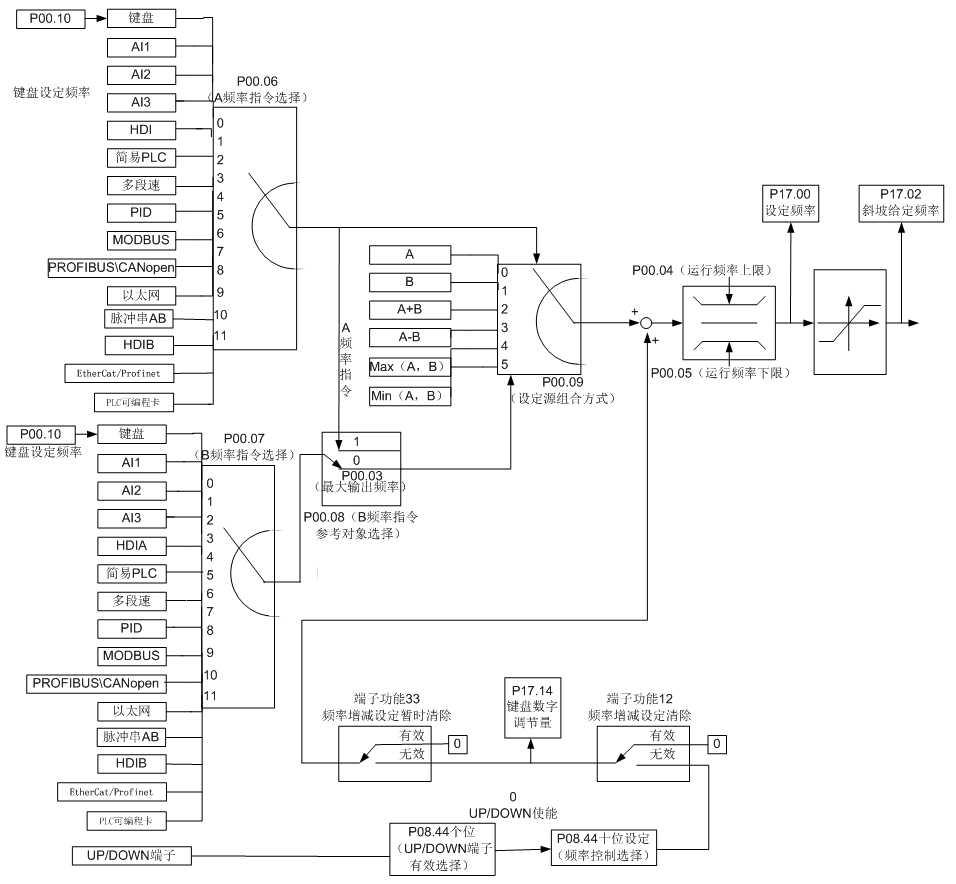
GD350 IP54系列变频器内部支持不同给定通道之间的相互切换,具体通道切换规则如下:
当前给定通道 P00.09 | 多功能端子功能13 A通道切换到B通道 | 多功能端子功能14 组合设定切换到A通道 | 多功能端子功能15 组合设定切换到B通道 |
A | B | / | / |
B | A | / | / |
A+B | / | A | B |
A-B | / | A | B |
Max(A,B) | / | A | B |
Min(A,B) | / | A | B |
注意:“/”表示在对应当前给定通道下,该多功能端子功能无效。
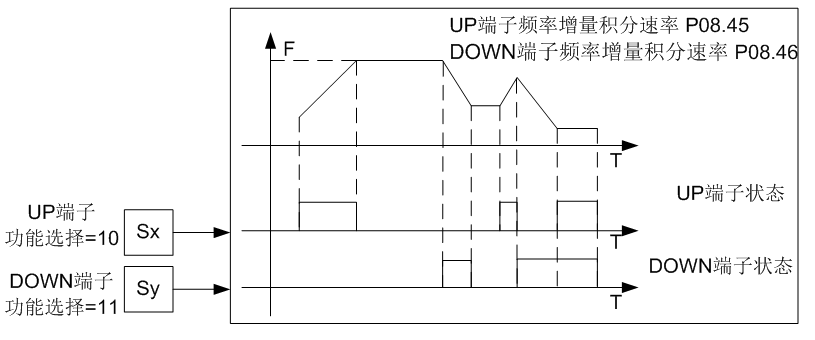
当选择通道多功能端子UP(10)和DOWN(11)来设定变频器内部的辅助频率时,可以通过设定UP端子频率增量变化率(P08.45)和DOWN端子频率变化率(P08.46),达到快速递增和快速递减设定频率的目的。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.03 | 最大输出频率 | P00.04~400.00Hz | 50.00Hz |
P00.04 | 运行频率上限 | P00.05~P00.03 | 50.00Hz |
P00.05 | 运行频率下限 | 0.00Hz~P00.04 | 0.00Hz |
P00.06 | A频率指令选择 | 0:键盘数字设定 1:模拟量AI1设定 2:模拟量AI2设定 3:模拟量AI3设定 4:高速脉冲HDIA设定 5:简易PLC程序设定 6:多段速运行设定 7:PID控制设定 8:Modbus通讯设定 9:PROFIBUS/CANopen/DeviceNet通讯设定 10:以太网通讯设定 11:高速脉冲HDIB设定 12:脉冲串AB设定 13:EtherCAT/PROFITNET通讯设定 14:可编程扩展卡设定 15:保留 | 0 |
P00.07 | B频率指令选择 | 15 | |
P00.08 | B频率指令 参考对象选择 | 0:最大输出频率 1:A频率指令 | 0 |
P00.09 | 设定源组合方式 | 0:A 1:B 2:(A+B)组合 3:(A-B)组合 4:Max(A,B)组合 5:Min(A,B)组合 | 0 |
P05.01~P05.06 | 多功能数字量输入端子(S1~S4,HDIA,HDIB) 功能选择 | 10:频率设定递增(UP) 11:频率设定递减(DOWN) 12:频率增减设定清除 13:A设定与B设定切换 14:组合设定与A设定切换 15:组合设定与B设定切换 | |
P08.42 | 预留变量 | / | / |
P08.43 | 预留变量 | / | / |
P08.44 | UP/DOWN端子控制设定 | 0x000~0x221 个位:频率使能选择 0:UP/DOWN端子设定有效 1:UP/DOWN端子设定无效 十位:频率控制选择 0:仅对P00.06=0或P00.07=0设定有效 1:所有频率方式均有效 2:多段速优先时,对多段速无效 百位:停机时动作选择 0:设定有效 1:运行中有效,停机后清除 2:运行中有效,收到停机命令后清除 | 0x000 |
P08.45 | UP端子频率增量变化率 | 0.01~50.00 Hz/s | 0.50 Hz/s |
P08.46 | DOWN端子减量频率变化率 | 0.01~50.00 Hz/s | 0.50 Hz/s |
P17.00 | 设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P17.02 | 斜坡给定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P17.14 | 数字调节量 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
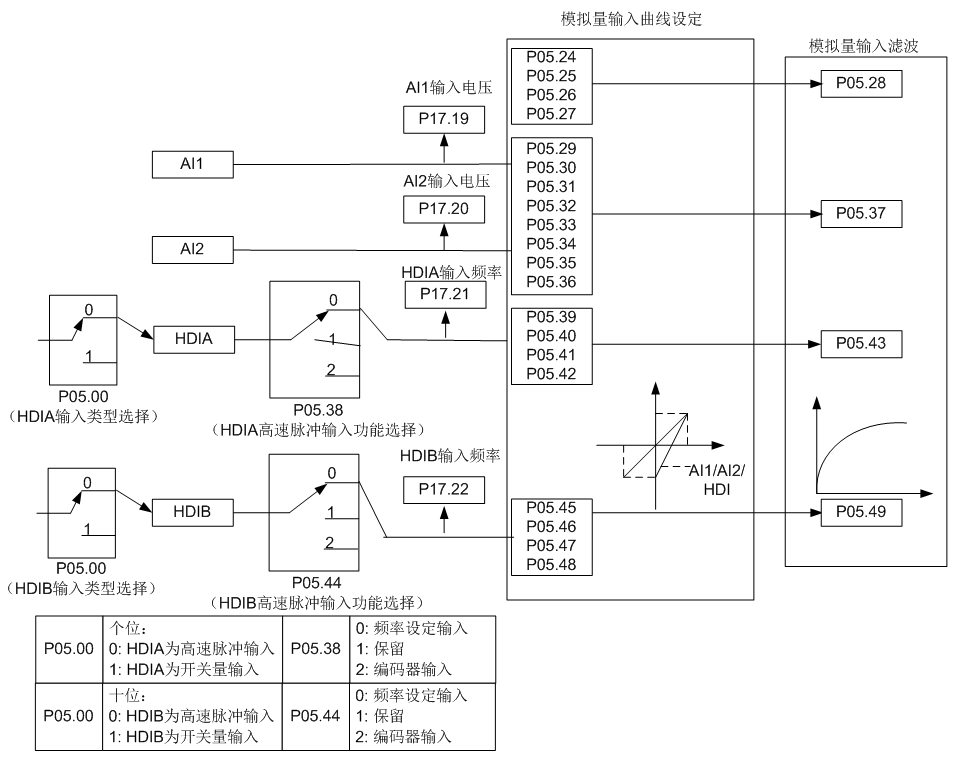
5.5.9 模拟量输入
GD350 IP54系列标配2个模拟量输入端子(其中AI1为0~10V/0~20mA,AI1可通过P05.50选择电压输入还是电流输入,AI2为-10~10V)和2个高速脉冲输入端子。每个输入都能单独进行滤波,并可以调整通过设置最大、最小值对应的给定来设定对应的给定曲线。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P05.00 | HDI输入类型选择 | 0x00~0x11 个位:HDIA输入类型选择 0:HDIA为高速脉冲输入 1:HDIA为开关量输入 十位:HDIB输入类型选择 0:HDIB为高速脉冲输入 1:HDIB为开关量输入 | 0x00 |
P05.24 | AI1下限值 | 0.00V~P05.26 | 0.00V |
P05.25 | AI1下限对应设定 | -300.0%~300.0% | 0.0% |
P05.26 | AI1上限值 | P05.24~10.00V | 10.00V |
P05.27 | AI1上限对应设定 | -300.0%~300.0% | 100.0% |
P05.28 | AI1输入滤波时间 | 0.000s~10.000s | 0.100s |
P05.29 | AI2下限值 | -10.00V~P05.31 | -10.00V |
P05.30 | AI2下限对应设定 | -300.0%~300.0% | -100.0% |
P05.31 | AI2中间值1 | P05.29~P05.33 | 0.00V |
P05.32 | AI2中间值1对应设定 | -300.0%~300.0% | 0.0% |
P05.33 | AI2中间值2 | P05.31~P05.35 | 0.00V |
P05.34 | AI2中间值2对应设定 | -300.0%~300.0% | 0.0% |
P05.35 | AI2上限值 | P05.33~10.00V | 10.00V |
P05.36 | AI2上限对应设定 | -300.0%~300.0% | 100.0% |
P05.37 | AI2输入滤波时间 | 0.000s~10.000s | 0.100s |
P05.38 | HDIA高速脉冲输入功能选择 | 0:频率设定输入 1:保留 2:编码器输入,需要配合HDIB使用 | 0 |
P05.39 | HDIA下限频率 | 0.000kHz ~ P05.41 | 0.000kHz |
P05.40 | HDIA下限频率对应设定 | -300.0%~300.0% | 0.0% |
P05.41 | HDIA上限频率 | P05.39 ~50.000kHz | 50.000kHz |
P05.42 | HDIA上限频率对应设定 | -300.0%~300.0% | 100.0% |
P05.43 | HDIA频率输入滤波时间 | 0.000s~10.000s | 0.030s |
P05.44 | HDIB高速脉冲输入功能选择 | 0:频率设定输入 1:保留 2:编码器输入,需要配合HDIA使用 | 0 |
P05.45 | HDIB下限频率 | 0.000kkHz ~ P05.47 | 0.000kHz |
P05.46 | HDIB下限频率对应设定 | -300.0%~300.0% | 0.0% |
P05.47 | HDIB上限频率 | P05.45 ~50.000kHz | 50.000kHz |
P05.48 | HDIB上限频率对应设定 | -300.0%~300.0% | 100.0% |
P05.49 | HDIB频率输入滤波时间 | 0.000s~10.000s | 0.030s |
P05.50 | AI1输入信号类型选择 | 0~1 0:电压型 1:电流型 | 0 |