5.5.19 主从功能调试
5.5.19.1 主从功能说明
主从控制一般分为功率均衡和速度同步。
1、 主从功率均衡
主从功率均衡是一种分配两个电机或多个电机间的负荷使其到达均匀平衡的控制方式,当一个传动设备由两个或多个电机驱动的时候,同时两个电机或多个电机轴通过齿轮、链条或传送带等相互耦合在一起,就需要通过主从该控制来分配各个电机间的负荷,以满足控制精度。
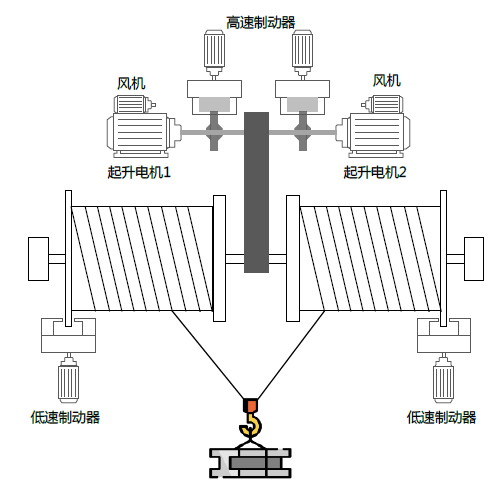
图 5‑6 机械结构示意图1
一般多台变频器控制多台电机通过皮带连接方式我们称为柔性连接(软连接),柔性连接时,一般从机采用速度模式,然后通过下垂功能来进行功率均衡效果会更佳。因此,在端子主从模式下,推荐采用主从模式a;在CAN通讯主从模式下,推荐采用主从模式0。
一般多台变频器控制多台电机同轴连接、齿轮连接或链条连接方式我们称为刚性连接(硬连接),刚性连接时,从机采用转矩控制模式效果会更佳。因此,在端子主从模式下,推荐采用主从模式b;在CAN通讯主从模式下,推荐采用主从模式1。
2、 主从速度同步
主从速度同步用于两台电机的速度同步运行,功能要求两台电机都具备安装编码器,变频器具备编码器脉冲计数功能。机械结构示意图如下图所示:
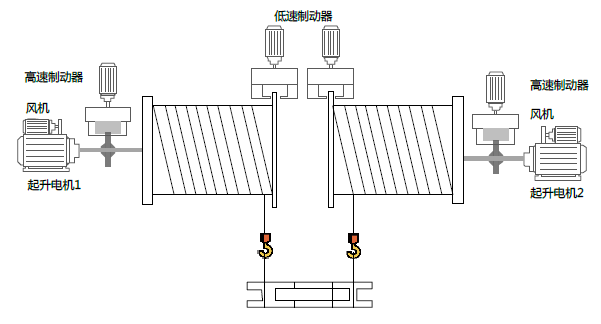
图 5‑7 机械结构示意图2
由于主从速度同步要求速度一致,变频器必须采用闭环模式,因此,只能采用CAN通讯主从模式下的主从模式4。
5.5.19.2 端子主从功能
A:通过变频器自身的高速脉冲输入端子HDIA和高速脉冲输出端子HDO可以实现简单的主从控制。
接线图如下:
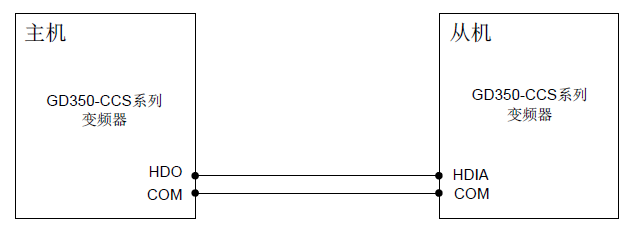
1、端子主从模式a
主机采用速度模式,然后将斜坡频率通过HDO传送给从机的HDIA端子,从机采用速度模式,频率给定由脉冲频率HDIA来设定频率给定,这时,我们需要调整从机P08.30下垂频率来满足功率平衡。
主机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
HDO输出类型选择 | 0:开路集电极高速脉冲输出 1:开路集电极输出 | 0 | |
HDO高速脉冲输出选择 | 0~47 2:斜坡给定频率 | 2 |
从机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
A频率指令选择 | 0~15 4:高速脉冲HDIA设定 | 4 | |
HDI输入类型选择 | 0x00~0x11 个位:HDIA输入类型选择 0:HDIA为高速脉冲输入 1:HDIA为开关量输入 十位:HDIB输入类型选择 0:HDIB为高速脉冲输入 1:HDIB为开关量输入 | 0x00 | |
下垂控制频率下降率 | 0.00~50.00Hz | 1.00hz |
2、端子主从模式b
主机采用速度模式,然后将转矩电流通过HDO传送给从机的HDIA端子,从机采用转矩模式,转矩给定由脉冲频率HDIA来设定转矩给定。
主机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
HDO输出类型选择 | 0:开路集电极高速脉冲输出 1:开路集电极输出 | 0 | |
HDO高速脉冲输出选择 | 0~47 22:转矩电流(相当于3倍电机额定电流) | 22 |
从机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
转矩设定方式选择 | 0~12 5:脉冲频率HDIA设定转矩 | 5 | |
HDI输入类型选择 | 0x00~0x11 个位:HDIA输入类型选择 0:HDIA为高速脉冲输入 1:HDIA为开关量输入 十位:HDIB输入类型选择 0:HDIB为高速脉冲输入 1:HDIB为开关量输入 | 0x00 |
B:通过变频器自身的模拟量输入端子(如AI1)和模拟量输出端子(如AO1)可以实现简单的主从控制。
接线图如下:
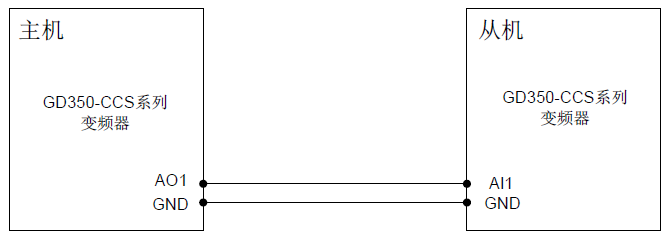
1、 端子主从模式a
主机采用速度模式,然后将斜坡频率通过AO1传送给从机的AI1端子,从机采用速度模式,频率给定由模拟量AI1来设定频率给定,这时,我们需要调整从机P08.30下垂频率来满足功率平衡。
主机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
AO1输出选择 | 0~47 2:斜坡给定频率 | 2 |
从机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
A频率指令选择 | 0~15 1:模拟量AI1设定 | 1 | |
下垂控制频率下降率 | 0.00~50.00Hz | 1.00hz |
2、 端子主从模式b
主机采用速度模式,然后将转矩电流通过AO1传送给从机的AI1端子,从机采用转矩模式,转矩给定由模拟量AI1来设定转矩给定。
主机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
AO1输出选择 | 0~47 22:转矩电流(相对于3倍电机额定电流) | 22 |
从机设置参数:
功能码 | 名称 | 参数详细说明 | 设定值 |
转矩设定方式选择 | 0~12 2:模拟量AI1设定转矩 | 2 |
注意:当使用端子主从功能时,调试与P28组功能无关。
5.5.19.3 通讯主从功能
变频器借助CAN主从通讯卡,可以实现主从功能,接线图如下:
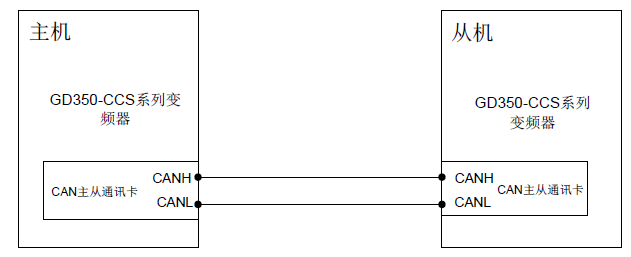
CAN通讯主从模式有以下几种,主从模式0~2为主从功率均衡,主从模式4为主从速度同步,主从模式3暂时保留。常用的一般为主从模式0和主从模式1:
1、 主从模式0(P28.02个位=0)
基本原理:主机、从机均采用速度控制,靠下垂控制进行功率平衡。
调试方法:变频器主机将P28.00设置为1,从机将P28.00设置为2,然后主机和从机的P28.02的个位均设置为0,选择主从模式0,从机可根据实际需要来设定P28.03速度增益。
主机将运行命令和速度通过CAN通讯传给从机,从机根据主机给定的命令进行起动,并按照主机给定的速度运行,这时,我们需要调整从机P08.30下垂频率来满足功率平衡。
2、 主从模式1(P28.02个位=1)
基本原理:主机和从机必须为同一类型的矢量控制模式,主机为速度控制,从机将强制为转矩控制模式。
调试方法:变频器主机将P28.00设置为1,从机将P28.00设置为2,然后主机和从机的P28.02的个位均设置为1,选择主从模式1,从机可根据实际需要来设定P28.04转矩增益,这时从机会自动切换为转矩模式,不需要调整P03组参数。
主机将运行命令和转矩通过CAN通讯传给从机,从机根据主机给定的命令进行起动,并按照主机给定的转矩运行。
3、 主从模式2(组合模式,P28.02个位=2)
基本原理:从机先速度模式(主从模式0)起动,然后在某一频率点切换为转矩模式(主从模式1)
调试方法:变频器主机将P28.00设置为1,从机将P28.00设置为2,然后主机和从机的P28.02的个位均设置为2,选择主从模式2,从机可根据实际需要来设定P28.03速度增益和P28.04转矩增益,同时设定P28.05速度模式/转矩模式切换频率点。
主机将运行命令、速度和转矩通过CAN通讯传给从机,从机根据主机给定的命令进行起动,在切换频率点之下时,按照主机给定的速度运行;在频率切换点之上时,按照主机给定的转矩运行。
4、 主从模式3(预留)
5、 主从模式4(闭环主从模式,速度同步模式)
基本原理:采用位置同步方式,速度同步就是说将主机和从机的位置脉冲计数值做比较,在从机侧将其位置脉冲误差进行一个速度修正,使误差降至为0。主机和从机都必须安装有编码器,主机和从机均采用速度控制,靠位置脉冲差值进行速度修正。
调试方法:
变频器主机将P28.00设置为1,从机将P28.00设置为2,然后主机和从机的P28.02的个位均设置为4,选择主从模式4。
如果从机与主机之间存在传动比,则根据实际设定P28.07主从传动单位脉冲比,然后设定P28.08位置同步偏差死区设定和P28.09位置同步偏差故障极限,当主机和从机脉冲差值大于P28.09时,则直接报故障;当主机和从机脉冲差值小于P28.08时,不进行速度修正;当主机和从机脉冲差值大于P28.08,小于P28.09时,开始进行速度修正,可根据需要调整参数P28.12比例系数、P28.13积分时间、P28.14滤波时间来控制误差的动态特性,同时可以设定P28.10调节器输出限幅来限制调节器的输出。
主机将运行命令、速度、位置脉冲通过CAN通讯传递给从机,从机根据自身的位置脉冲和主机传来的位置脉冲对速度进行自动修正。
注:开环矢量只能用主从模式0~3,闭环矢量则全部主从模式均可以使用
功能码 | 名称 | 参数详细说明 | 缺省值 |
主从模式选择 | 0:主从控制无效 1:本机为主机 2:本机为从机 | 0 | |
主从方式选择 | 0:CAN 1:预留 | 0 | |
主从控制模式 | 个位:主从机运行模式选择 0:主从模式0 (主机、从机均采用速度控制,靠下垂控制进行功率平衡) 1:主从模式1 (主机和从机必须为同一类型的矢量控制模式,主机为速度控制,从机将强制为转矩控制模式。 2:组合模式(主从模式2) 从机先速度模式(主从模式0)起动,然后在某一频率点切换为转矩模式(主从模式1) 3:主从模式3(保留) (主机、从机均采用速度控制,从机靠使用主机的速度环积分结果进行功率平衡) 4:闭环主从模式(主从模式4) 采用位置同步方式,主机和从机都必须安装有编码器,主机和从机均采用速度控制,靠位置脉冲差值进行速度修正 5:主从模式5 (主机、从机均采用闭环速度控制,从机靠使用主机的速度环输出进行功率平衡) 十位:从机起动命令源选择选择 0:跟随主机起动 1:由P00.01确定 百位:从机发送/主机接收数据使能 0:使能 1:不使能 | 0x001 | |
从机速度增益 | 0.0~500.0% | 100.0% | |
从机转矩增益 | 0.0~500.0% | 100.0% | |
主从模式2速度模式/转矩模式切换频率点 | 0.00~10.00Hz | 5.00 | |
从机个数 | 0~15 | 1 | |
位置同步主从传动单位脉冲比 | 0.00~100.00 | 1.00 | |
位置同步偏差死区设定 | 0~50000 当主机和从机的位置偏差大于P28.08时,从机修正有效 | 50 | |
位置同步偏差故障极限 | 0~50000 当主机和从机的位置偏差大于P28.09时,报主从位置故障 | 1000 | |
位置同步调节器输出限幅 | 0.0~100.0% | 5.0% | |
位置同步脉冲计数复位方式 | 0~1 0:自动 停机时,位置同步脉冲计数自动清零 1:端子使能 输入端子选择位置同步脉冲计数复位功能,有信号输入时脉冲计数自动清零。 | 0 | |
位置同步比例系数 | 0.000~10.000 | 0.005 | |
位置同步积分时间 | 0.01~80.00s | 8.00s | |
位置同步滤波时间 | 0.00~10.00s | 0.05s |
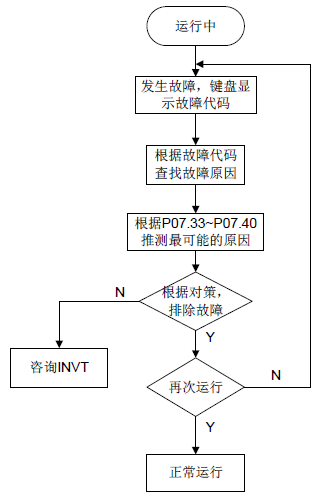
5.5.20 故障处理
GD350-CCS系列提供丰富故障处理信息,以方便用户的适用。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
最近故障类型 | 0:无故障 1:逆变单元U相保护(OUt1) 2:逆变单元V相保护(OUt2) 3:逆变单元W相保护(OUt3) 4:加速过电流(OC1) 5:减速过电流(OC2) 6:恒速过电流(OC3) 7:加速过电压(OV1) 8:减速过电压(OV2) 9:恒速过电压(OV3) 10:母线欠压故障(UV) 11:电机过载(OL1) 12:变频器过载(OL2) 13:输入侧缺相(SPI) 14:输出侧缺相(SPO) 15:整流模块过热(OH1) 16:逆变模块过热故障(OH2) 17:外部故障(EF) 18:485通讯故障(CE) 19:电流检测故障(ItE) 20:电机自学习故障(tE) 21:EEPROM操作故障(EEP) 22:PID反馈断线故障(PIDE) 23:制动单元故障(bCE) 24:运行时间达到(END) 25:电子过载(OL3) 26:键盘通讯错误(PCE) 27:参数上传错误(UPE) 28:参数下载错误(DNE) 29:Profibus DP通讯故障(E-DP) 30:以太网通信故障(E-NET) 31:CANopen通信故障(E-CAN) 32:对地短路故障1(ETH1) 33:对地短路故障2(ETH2) 34:速度偏差故障(dEu) 35:失调故障(STo) 36:欠载故障(LL) 37:编码器断线故障(ENC1O) 38:编码器反向故障(ENC1D) 39:编码器Z脉冲断线故障(ENC1Z) 40:安全转矩停止(STO) 41:通道1安全回路异常(STL1) 42:通道2安全回路异常(STL2) 43:通道1和通道2同时异常(STL3) 44:安全代码FLASH CRC校验故障(CrCE) 45:PLC卡自定义故障1(P-E1) 46:PLC卡自定义故障2(P-E2) 47:PLC卡自定义故障3(P-E3) 48:PLC卡自定义故障4(P-E4) 49:PLC卡自定义故障5(P-E5) 50:PLC卡自定义故障6(P-E6) 51:PLC卡自定义故障7(P-E7) 52:PLC卡自定义故障8(P-E8) 53:PLC卡自定义故障9(P-E9) 54:PLC卡自定义故障10(P-E10) 55:扩展卡类型重复故障(E-Err) 56:编码器UVW丢失故障(ENCUV) 57:Profinet通信超时故障(E-PN) 58:CAN通信故障(SECAN) 59:电机过温故障(OT) 60:卡槽1卡识别失败(F1-Er) 61:卡槽2卡识别失败(F2-Er) 62:卡槽3卡识别失败(F3-Er) 63:卡槽1卡通信超时故障(C1-Er) 64:卡槽2卡通信超时故障(C2-Er) 65:卡槽3卡通信超时故障(C3-Er) 66:EtherCat通信故障(E-CAT) 67:Bacnet通信故障(E-BAC) 68:DeviceNet通信故障(E-DEV) 69:主从同步CAN从机故障(S-Err) 70:变频器未使能故障(dIS) 71:接触器反馈故障(tbE) 72:抱闸反馈故障(FAE) 73:转矩验证故障(tPF) 74:操作杆零位故障(STC) 75:低速运行保护故障(LSP) 76:端子命令异常故障(tCE) 77:上电端子命令异常故障(POE) 78:松绳保护故障(SLE) 79:抱闸失灵故障(bE) 80:主从位置同步故障(ELS) 81:模拟量速度给定偏差故障(AdE) 82:PT100过温故障(OtE1) 83:PT1000过温故障(OtE2) 84:设定频率故障(SFE) 85:电流不平衡故障(Cuu) 86:PTC过温故障(PtcE) | 0 | |
前1次故障类型 | |||
前2次故障类型 | |||
前3次故障类型 | |||
前4次故障类型 | |||
前5次故障类型 | |||
最近故障运行频率 | 0.00Hz~P00.03 | 0.00Hz | |
最近故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz | |
最近故障输出电压 | 0~1200V | 0V | |
最近故障输出电流 | 0.0~6300.0A | 0.0A | |
最近故障母线电压 | 0.0~2000.0V | 0.0V | |
最近故障时最高温度 | -20.0~120.0℃ | 0.0℃ | |
最近故障输入端子状态 | 0x0000~0xFFFF | 0 | |
最近故障输出端子状态 | 0x0000~0xFFFF | 0 | |
前1次故障运行频率 | 0.00Hz~P00.03 | 0.00Hz | |
前1次故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz | |
前1次故障输出电压 | 0~1200V | 0V | |
前1次故障输出电流 | 0.0~6300.0A | 0.0A | |
前1次故障母线电压 | 0.0~2000.0V | 0.0V | |
前1次故障时温度 | -20.0~120.0℃ | 0.0℃ | |
前1次故障输入端子状态 | 0x0000~0xFFFF | 0 | |
前1次故障输出端子状态 | 0x0000~0xFFFF | 0 | |
前2次故障运行频率 | 0.00Hz~P00.03 | 0.00Hz | |
前2次故障斜坡给定频率 | 0.00Hz~P00.03 | 0.00Hz | |
前2次故障输出电压 | 0~1200V | 0V | |
前2次故障输出电流 | 0.0~6300.0A | 0.0A | |
前2次故障母线电压 | 0.0~2000.0V | 0.0V | |
前2次故障时温度 | -20.0~120.0℃ | 0.0℃ | |
前2次故障输入端子状态 | 0x0000~0xFFFF | 0 | |
前2次故障输出端子状态 | 0x0000~0xFFFF | 0 |