Goodrive300变频器还内置了空间电压矢量控制功能,对于空间电压矢量控制可以用于各种控制精度要求不高的场合,对于一拖多的应用场合,也建议采用空间电压矢量控制模式。
Goodrive300变频器提供了多种V/F曲线模式选择,用户可以根据现场的需要来选择对应的V/F曲线,也可以根据自己的需求,来设置对应的V/F曲线。
建议:
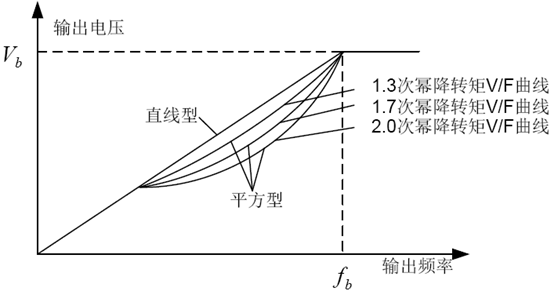
• 对于恒定力矩的负载,如直线运行的传送带等负载,由于其在整个运行过程中要求力矩恒定,所以选择直线型V/F曲线。
• 对于递减力矩特性的负载,如风机、水泵等负载,由于其实际转矩与转速之间呈2次方或者是3次方的关系,因而可以选择对应的1.3、1.7或2次幂的V/F曲线。
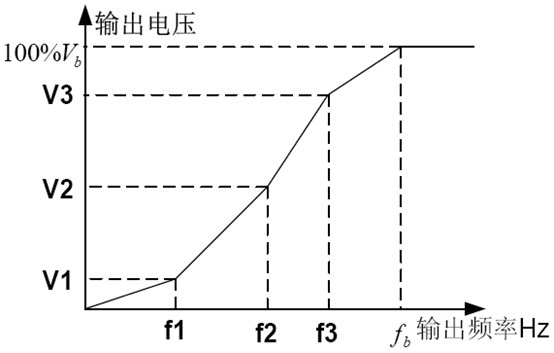
Goodrive300变频器还提供了多点的V/F曲线,用户可以通过分别设置中间三点的电压和频率来改变变频器输出的V/F曲线,整个曲线由5点组成,起点为(0Hz、0V),终点为(电机基频、电机额定电压),在设置过程中要求:0≤f1≤f2≤f3≤电机基频;0≤V1≤V2≤V3≤电机额定电压。
Goodrive300变频器为空间电压矢量控制模式设置专用的功能码,通过设置可以有效提升空间电压矢量控制的性能:
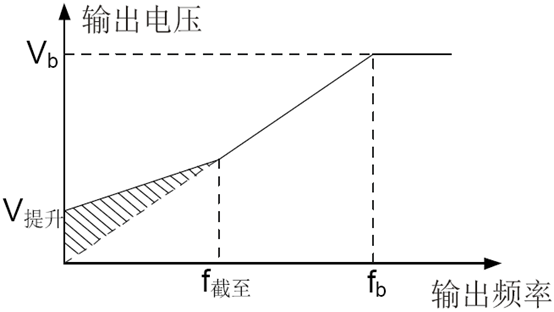
1. 转矩提升
转矩提升功能,可以有效补偿空间电压矢量控制时的低速转矩性能,出厂缺省为自动转矩提升功能,由变频器根据实际的负载情况,自动调节转矩提升值。
注意:
• 转矩提升只有在转矩提升截止频率之下才起作用;
• 转矩提升过大,会引起电机的低频振动甚至过流故障发生,遇到这种情况请调小转矩提升值。
2. 节能运行
变频器在实际运行中,可以自动寻找效率最高点进行运行,使得变频器始终工作在效率最高的状态,达到节能的目的。
注意:
该功能一般应用在轻载或者是空载运行比较多的场合。
对于负载需要经常突变的场合,不适合选用该功能。
3. V/F转差补偿增益
空间电压矢量控制属于开环模式,当电机负载突变时,会引起电机转速的波动,对于一些对速度要求比较高的场合,可以通过设置转差补偿增以来通过变频器内部调节输出的方式,补偿负载波动所引起的速度变化。
转差补偿增益的设定范围为:0~200%,其中100%对应额定转差频率。
注:额定转差频率=(电机额定同步转速-电机额定转速)*电机极对数/60
4. 振荡抑制
电机振荡是在大功率传动场合采用空间电压矢量控制模式运行时常常遇到的问题,为了解决这个问题,Goodrive300系列增加了两个设置抑制振荡因子的功能码,用户可以根据发生振荡的频率来分别设置相对应的功能码。
注意:设置值越大抑制效果越明显,但是设置值过大也容易造成变频器输出电流过大等问题。
5. 自定义V/F曲线(V/F分离)功能
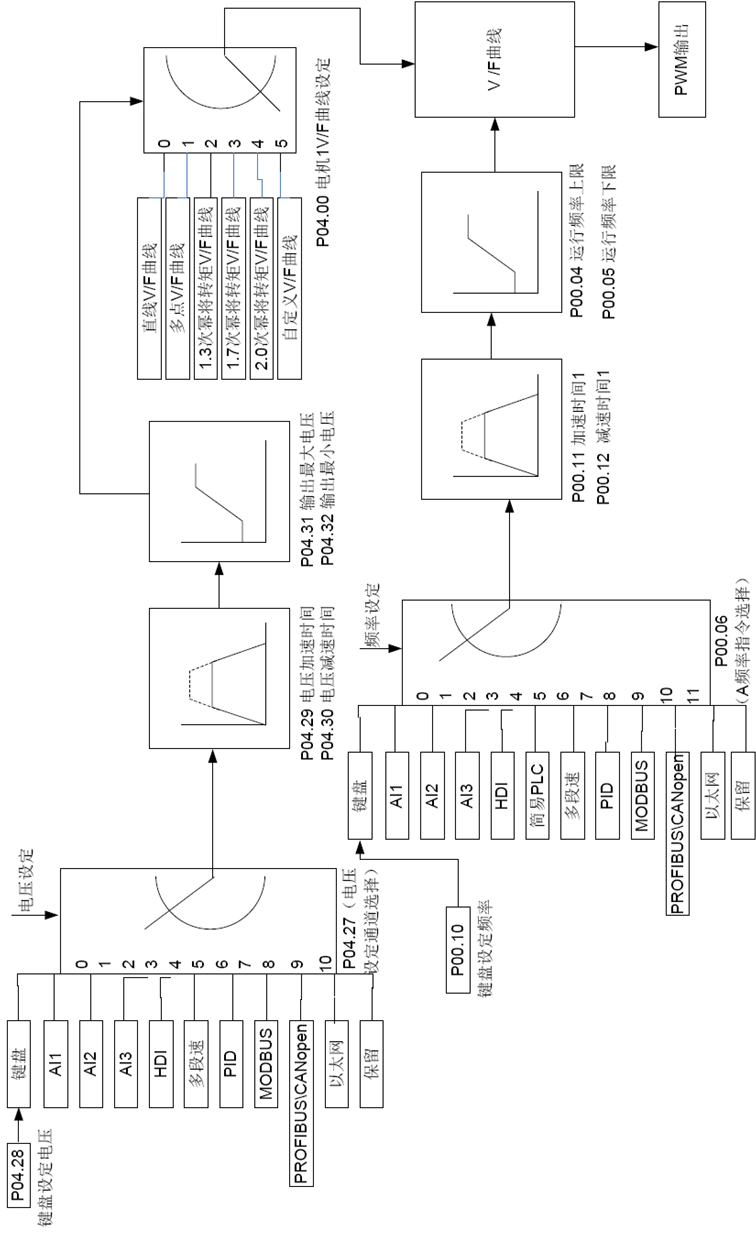
当用户选择Goodrive300系列的自定义V/F曲线功能时,用户可以分别设定电压和频率的给定通道,以及对应电压和频率的加减速时间,由二者最终组合成实时的V/F曲线。
注意:这种V/F曲线分离的应用适用于各种变频电源的场合,但是用户在设置和调节参数时必须慎重,参数设置不当,可能引起机器损坏。
功能码 | 名称 | 参数详细说明 | 缺省值 |
P00.00 | 速度控制模式 | 0:无PG矢量控制模式0(适用于AM,SM) 1:无PG矢量控制模式1(适用于AM) 2:空间电压矢量控制模式(适用于AM,SM) | 1 |
P00.03 | 最大输出频率 | P00.04~400.00Hz | 50.00Hz |
P00.04 | 运行频率上限 | P00.05~P00.03 | 50.00Hz |
P00.05 | 运行频率下限 | 0.00Hz~P00.04 | 0.00Hz |
P00.11 | 加速时间1 | 0.0~3600.0s | 机型确定 |
P00.12 | 减速时间1 | 0.0~3600.0s | 机型确定 |
P02.00 | 电机1类型 | 0:异步电机 1:同步电机 | 0 |
P02.02 | 异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz |
P02.04 | 异步电机1额定电压 | 0~1200V | 机型确定 |
P04.00 | 电机1V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 |
P04.01 | 电机1转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% |
P04.02 | 电机1转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% |
P04.03 | 电机1V/F频率点1 | 0.00Hz~P04.05 | 0.00Hz |
P04.04 | 电机1V/F电压点1 | 0.0%~110.0% | 0.0% |
P04.05 | 电机1V/F频率点2 | P04.03~ P04.07 | 0.00Hz |
P04.06 | 电机1V/F电压点2 | 0.0%~110.0% | 0.0% |
P04.07 | 电机1V/F频率点3 | P04.05~ P02.02或P04.05~ P02.16 | 0.00Hz |
P04.08 | 电机1V/F电压点3 | 0.0%~110.0% | 0.0% |
P04.09 | 电机1V/F转差补偿增益 | 0.0~200.0% | 100.0% |
P04.10 | 电机1低频抑制振荡因子 | 0~100 | 10 |
P04.11 | 电机1高频抑制振荡因子 | 0~100 | 10 |
P04.12 | 电机1抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz |
P04.13 | 电机2V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 |
P04.14 | 电机2转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% |
P04.15 | 电机2转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% |
P04.16 | 电机2V/F频率点1 | 0.00Hz~P04.18 | 0.00Hz |
P04.17 | 电机2V/F电压点1 | 0.0%~110.0% | 0.0% |
P04.18 | 电机2V/F频率点2 | P04.16~ P04.20 | 0.00Hz |
P04.19 | 电机2V/F电压点2 | 0.0%~110.0% | 0.0% |
P04.20 | 电机2V/F频率点3 | P04.18~ P02.02或P04.18~ P02.16 | 0.00Hz |
P04.21 | 电机2V/F电压点3 | 0.0%~110.0% | 0.0% |
P04.22 | 电机2V/F转差补偿增益 | 0.0~200.0% | 100.0% |
P04.23 | 电机2低频抑制振荡因子 | 0~100 | 10 |
P04.24 | 电机2高频抑制振荡因子 | 0~100 | 10 |
P04.25 | 电机2抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz |
P04.26 | 节能运行选择 | 0:不动作 1:自动节能运行 | 0 |
P04.27 | 电压设定通道选择 | 0:键盘设定电压;输出电压由P04.28决定。 1:AI1设定电压 2:AI2设定电压 3:AI3设定电压 4:HDI设定电压 5:多段设定电压 6:PID设定电压 7:Modbus通讯设定电压 8:PROFIBUS/ CANopen通讯设定电压 9:以太网通讯设定电压(保留) 10:保留 | 0 |
P04.28 | 键盘设定电压值 | 0.0%~100.0%(电机额定电压) | 100.0% |
P04.29 | 电压增加时间 | 0.0~3600.0s | 5.0s |
P04.30 | 电压减少时间 | 0.0~3600.0s | 5.0s |
P04.31 | 输出最大电压 | P04.32~100.0%(电机额定电压) | 100.0% |
P04.32 | 输出最小电压 | 0.0%~P04.31(电机额定电压) | 0.0% |