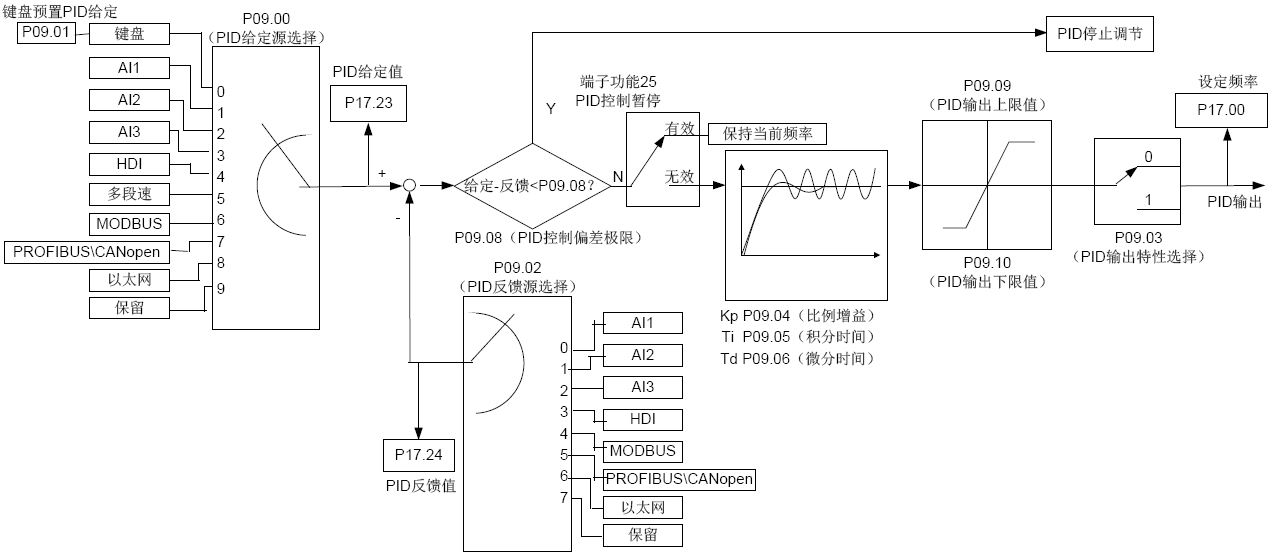
PID控制是用于过程控制的一种常用方法,通过对被控量的反馈信号与目标量信号的差量进行比例、积分、微分运算,来调整变频器的输出频率,构成负反馈系统,使被控量稳定在目标量上。适用于流量控制、压力控制及温度控制等过程控制。控制基本原理框图如下:
PID控制工作原理简要和调节方法简单介绍:
比例调节(Kp):当反馈与给定出现偏差时,输出与偏差成比例调节,若偏差恒定,则调节量也恒定。比例调节可以快速响应反馈的变化,但单纯用比例调节无法做到无差控制。比例增益越大,系统的调节速度越快,但若过大会出现振荡。调节方法为先将积分时间设很长,微分时间设为零,单用比例调节使系统运行起来,改变给定量的大小,观察反馈信号和给定量的稳定的偏差(静差),如果静差在给定量改变的方向上(例如增加给定量,系统稳定后反馈量总小于给定量),则继续增加比例增益,反之则减小比例增益,重复上面的过程,直到静差比较小。
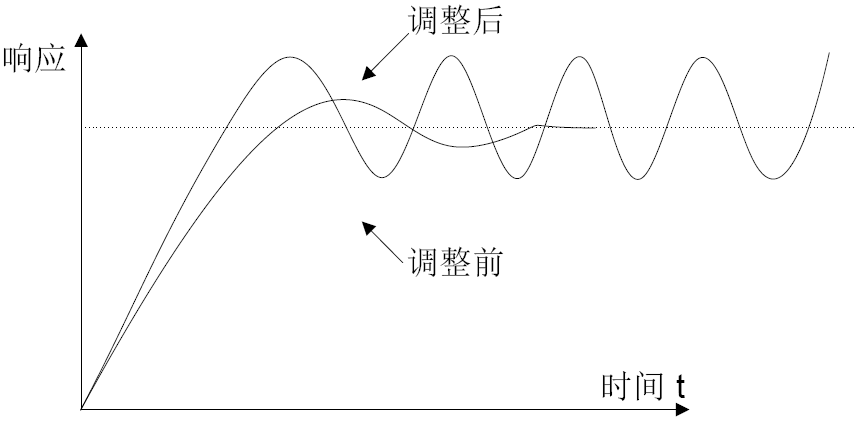
积分时间(Ti):当反馈与给定出现偏差时,输出调节量连续累加,如果偏差持续存在,则调节量持续增加,直到没有偏差。积分调节器可以有效地消除静差。积分调节器过强则会出现反复的超调,使系统一直不稳定,直到产生振荡。由于积分作用过强引起的振荡的特点是:反馈信号在给定量的上下摆动,摆幅逐步增大,直至振荡。积分时间参数的调节一般由大到小调,逐步调节积分时间,观察系统调节的效果,直到系统稳定的速度达到要求。
微分时间(Td):当反馈与给定的偏差变化时,输出与偏差变化率成比例的调节量,该调节量只与偏差变化的方向和大小有关,而与偏差本身的方向和大小无关。微分调节的作用是在反馈信号发生变化时,根据变化的趋势进行调节,从而抑制反馈信号的变化。微分调节器请谨慎使用,因为微分调节容易放大系统的干扰,尤其是变化频率较高的干扰。
当频率指令选择(P00.06、P00. 07)为7或者电压设定通道选择(P04.27)为6时,变频器运行模式为过程PID控制。
7.15.1 PID参数设定的一般步骤
a. 确定比例增益P
确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b.确定积分时间Ti
比例增益P确定后,设定一个较大的积分时间数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c.确定微分时间Td
微分时间Td一般不用设定,为0即可。
若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
d.系统空载、带载联调,再对PID参数进行微调,直至满足要求。
7.15.2 PID微调方法
设定PID控制的参数后,可以用以下的方法进行微调。
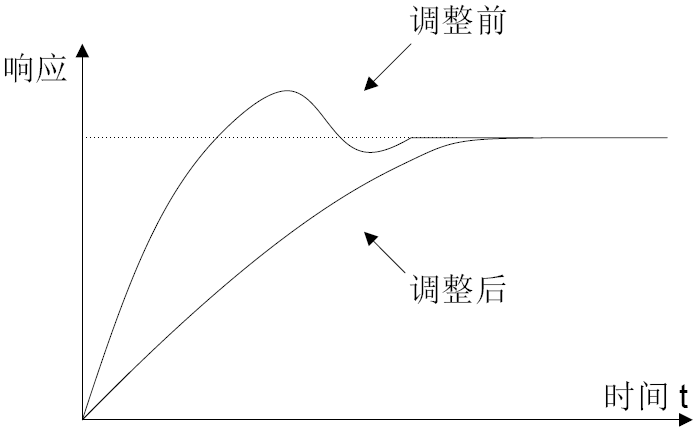
抑制超调:发生超调时,请缩短微分时间(Td),延长积分时间(Ti)。
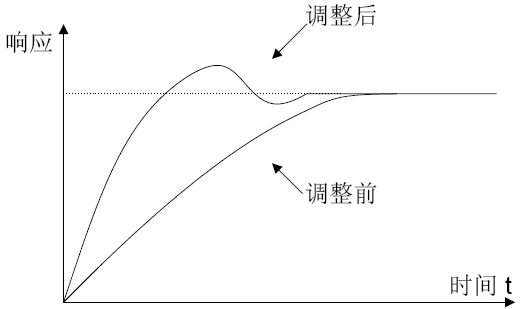
尽快使其达到稳定状态:即使发生超调,但要尽快稳定控制时,请缩短积分时间(Ti),延长微分时间(Td)。
抑制周期较长的振动:如果周期性振动的周期比积分时间(Ti)的设定值还要长时,说明积分动作太强,延长积分时间(Ti)则可抑制振动。
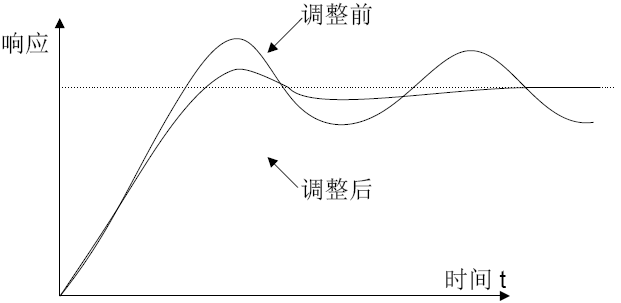
抑制周期较短的振动:振动周期较短,振动周期与微分时间(Td)的设定值几乎相同,说明微分动作太强。如缩短微分时间(Td),则可抑制振动。当将微分时间(Td)设定为0.00(即无微分控制),也无法抑制振动时,请减小比例增益。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
P09.00 | PID给定源选择 | 0:键盘定数字给定(P09.01) 1:模拟通道AI1给定 2:模拟通道AI2给定 3:模拟通道AI3设定 4:高速脉冲HDI设定 5:多段给定 6:Modbus通讯设定 7:PROFIBUS/ CANopen通讯设定 8:以太网通讯设定 9:保留 | 0 |
P09.01 | 键盘预置PID给定 | -100.0%~100.0% | 0.0% |
P09.02 | PID反馈源选择 | 0:模拟通道AI1反馈 1:模拟通道AI2反馈 2:模拟通道AI3反馈 3:高速脉冲HDI反馈 4:Modbus通讯反馈 5:PROFIBUS/ CANopen通讯反馈 6:以太网通讯反馈 7:保留 | 0 |
P09.03 | PID输出特性选择 | 0:PID输出为正特性 1:PID输出为负特性 | 0 |
P09.04 | 比例增益(Kp) | 0.00~100.00 | 1.00 |
P09.05 | 积分时间(Ti) | 0.01~10.00s | 0.10s |
P09.06 | 微分时间(Td) | 0.00~10.00s | 0.00s |
P09.07 | 采样周期(T) | 0.000~10.000s | 0.100s |
P09.08 | PID控制偏差极限 | 0.0~100.0% | 0.0% |
P09.09 | PID输出上限值 | P09.10~100.0%(最大频率或电压) | 100.0% |
P09.10 | PID输出下限值 | -100.0%~P09.09(最大频率或电压) | 0.0% |
P09.11 | 反馈断线检测值 | 0.0~100.0% | 0.0% |
P09.12 | 反馈断线检测时间 | 0.0~3600.0s | 1.0s |
P09.13 | PID调节选择 | 0x0000~0x1111 LED个位: 0:频率到达上下限继续积分调节 1:频率到达上下限停止积分调节 LED十位: 0:与主给定方向一致 1:可与主给定方向相反 LED百位: 0:按照最大频率限幅 1:按照A频率限幅 LED千位: 0:A+B频率,主给定A频率源缓冲加减速无效 1:A+B频率,主给定A频率源缓冲加减速 有效,加减速由P08.04加速时间4确定 | 0x0001 |
P17.00 | 设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz |
P17.23 | PID给定值 | -100.0~100.0% | 0.0% |
P17.24 | PID反馈值 | -100.0~100.0% | 0.0% |