功能码 | 名称 | 参数详细说明 | 缺省值 | 更改 |
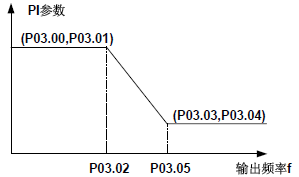
速度环 比例增益1 | P03.00~P03.05的参数只适用于矢量控制模式。在切换频率1(P03.02)以下,速度环PI参数为:P03.00和P03.01。在切换频率2(P03.05)以上,速度环PI参数为:P03.03和P03.04。二者之间,PI参数由两组参数线性变化获得,如下图示:
通过设定速度调节器的比例系数和积分时间,可以调节矢量控制的速度环动态响应特性。增加比例增益,减小积分时间,均可加快速度环的动态响应,但比例增益过大或积分时间过小均容易导致系统振荡,超调过大。比例增益过小也容易导致系统稳态振荡,且有可能存在速度静差。 速度环PI参数与系统的惯性关系密切,针对不同的负载特性需要在缺省PI参数的基础上进行调整,以满足各种场合的需求。 P03.00设定范围:0.0~200.0 P03.01设定范围:0.000~10.000s P03.02设定范围:0.00Hz~P03.05 P03.03设定范围:0.0~200.0 P03.04设定范围:0.000~10.000s P03.05设定范围:P03.02~P00.03(最大输出频率) | 20.0 | ○ | |
速度环 积分时间1 | 0.200s | ○ | ||
切换低点频率 | 5.00Hz | ○ | ||
速度环 比例增益2 | 20.0 | ○ | ||
速度环 积分时间2 | 0.200s | ○ | ||
切换高点频率 | 10.00Hz | ○ | ||
速度环 输出滤波 | 0~8(对应0~28/10ms) | 0 | ○ | |
矢量控制电动转差补偿系数 | 转差补偿系数用于调整矢量控制的转差频率,改善系统的速度控制精度,适当调整该参数,可以有效抑制速度静差。 设定范围:50~200% | 100% | ○ | |
矢量控制制动转差补偿系数 | 100% | ○ | ||
电流环 比例系数P | 注意: 1、这两个参数调节的是电流环的PI调节参数,它直接影响系统的动态响应速度和控制精度,一般情况下用户无需更改该缺省值。 2、适用于无PG矢量控制模式0(P00.00=0)和闭环矢量控制模式(P00.00=3) 3、同步电机参数自学习后会自动更新该功能码数值 设定范围:0~20000 | 1000 | ○ | |
电流环 积分系数I | 1000 | ○ | ||
转矩 设定方式选择 | 用来使能转矩控制模式,并设置转矩设定方式。 0:转矩控制无效 1:键盘设定转矩(P03.12) 2:模拟量AI1设定转矩 3:模拟量AI2设定转矩 4:模拟量AI3设定转矩 5:脉冲频率HDI设定转矩 6:多段转矩设定 7:MODBUS通讯设定转矩 8:PROFIBUS\CANopen通讯设定转矩 9:以太网通讯设定转矩 10:保留 注意:设定方式2~10,100%对应于3倍的电机额定电流。 | 0 | ○ | |
键盘设定转矩 | 设定范围:-300.0%~300.0%(电机额定电流) | 10.0% | ○ | |
转矩给定 滤波时间 | 0.000~10.000s | 0.100s | ○ | |
转矩控制 正转上限频率 设定源选择 | 0:键盘设定上限频率(P03.16设定P03.14,P03.17设定P03.15) 1:模拟量AI1设定上限频率 2:模拟量AI2设定上限频率 3:模拟量AI3设定上限频率 4:脉冲频率HDI设定上限频率 5:多段设定上限频率 6:MODBUS通讯设定上限频率 7:PROFIBUS\CANopen通讯设定转矩 8:以太网通讯设定转矩 注意:设定方式0~8,100%相对于最大频率。 | 0 | ○ | |
转矩控制 反转上限频率设定源选择 | 0 | ○ | ||
转矩控制 正转上限频率键盘限定值 | 此功能码用来设置频率限。100%相对于最大频率。P03.16设定P03.14=1时的值,P03.17设定P03.15=1时的值。 设定范围:0.00Hz~P00.03(最大输出频率) | 50.00Hz | ○ | |
转矩控制 反转上限频率键盘限定值 | 50.00 Hz | ○ | ||
电动转矩上限设定源选择 | 此功能码用来选择电动、制动转矩上限设定源。 0:键盘设定转矩上限(P03.20设定P03.18的值,P03.21设定P03.19的值) 1:模拟量AI1设定转矩上限 2:模拟量AI2设定转矩上限 3:模拟量AI3设定转矩上限 4:脉冲频率HDI设定转矩上限 5:MODBUS通讯设定转矩上限 6:PROFIBUS\CANopen通讯设定转矩上限 7:以太网通讯设定转矩上限 注意:设定方式1~7,100%相对于3倍电机电流。 | 0 | ○ | |
制动转矩上限设定源选择 | 0 | ○ | ||
电动转矩 上限键盘设定 | 此功能码用来设置转矩限值。 设定范围:0.0~300.0%(电机额定电流) | 180.0% | ○ | |
制动转矩 上限键盘设定 | 180.0% | ○ | ||
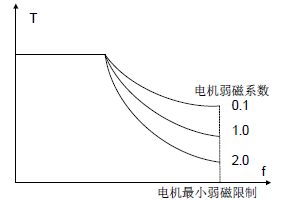
恒功区 弱磁系数 | 异步电机在弱磁控制时使用。
功能码P03.22和P03.23在恒功率时有效,当电机转速在额定转速以上运行时,电机即进入弱磁运行状态。通过修改弱磁控制系数可以改变弱磁曲线曲率,该值越大弱磁曲线越陡,该值越小弱磁曲线越平缓。 P03.22设定范围:0.10~2.00 P03.23设定范围:5%~50% | 1.00 | ○ | |
恒功区 最小弱磁点 | 20% | ○ | ||
最大电压限制 | P03.24设定变频器可以输出的最大电压,为电机额定电压参数的百分比。这个值要根据现场实际情况来设定。 设定范围:0.0~120.0% | 100.0% | ◎ | |
预激磁时间 | 变频器启动时进行电机预励磁,在电机内部建立磁场,可以有效改善电机启动过程中的力矩特性。 设定范围:0.000~10.000s | 0.000s | ○ | |
弱磁比例增益 | 弱磁控制器的响应特性与P03.26,P03.27有关,可适当调整。 设定范围:0~8000 | 1200 | ○ | |
弱磁积分增益 | 1200 | ○ | ||
弱磁控制模式选择 | 0x000~0x112 个位:控制模式选择 0:模式0 1:模式1 2:模式2 十位:电感饱和系数补偿 0:补偿 1:不补偿 百位:高速控制模式 0:模式0 1:模式1 | 0x000 | ○ | |
控制模式选择 | 0x0000~0x7111 个位:转矩指令选择 0:转矩给定 1:转矩电流给定 十位:0速摩擦转矩补偿方向选择 0:正向 1:反向 百位:速度环积分分离选择 0:不使能 1:使能 千位:转矩控制字选择 Bit0:转矩指令滤波方式 0:惯性滤波 1:直线加减速滤波 Bit1~2:转速上限加减速时间选择 0:无加减速时间 1:加减速时间1 2:加减速时间2 3:加减速时间3 | 0x0001 | ○ | |
低速摩擦转矩 | P03.30是低速时(<1.0Hz)的摩擦转矩补偿值。 P03.31 是高速时(>P03.32)的摩擦转矩补偿量,在低速和高速之间的摩擦转矩为P03.30和P03.31的线性比例。 注意:转矩补偿只在转矩控制模式下有效(P03.11不为0)。 P03.30设定范围:0.0~50.0%(电机额定转矩) P03.31设定范围:0.0~50.0%(电机额定转矩) P03.32设定范围:1.00 Hz~400.00Hz | 0.0% | ○ |