5.5.1 本节内容
本节介绍变频器内部各功能模块。
|
|

常规调试步骤
常规操作步骤如下图所示:(以电机1为例)
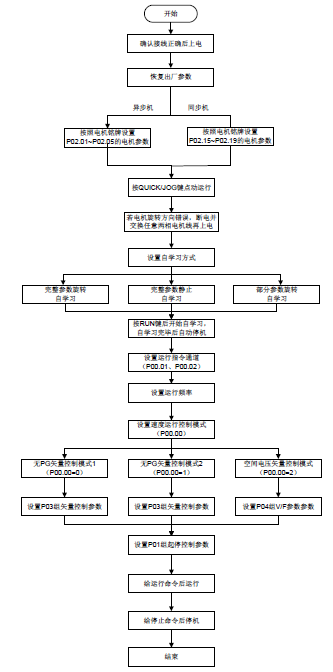
注意:如果发生故障,请按照“故障跟踪”判断发生原因,排除故障。
设置运行指令通道除了可以通过P00.01和P00.02设置之外,还可以通过端子命令设置。
当前运行指令通道P00.01 | 多功能端子功能36命令切换到键盘 | 多功能端子功能37命令切换到端子 | 多功能端子功能38命令切换到通讯 |
键盘运行指令通道 | / | 端子运行指令通道 | 通讯运行指令通道 |
端子运行指令通道 | 键盘运行指令通道 | / | 通讯运行指令通道 |
通讯运行指令通道 | 键盘运行指令通道 | 端子运行指令通道 | / |
注:“/”表示在对应当前给定通道下,该多功能端子功能无效。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 | |
运行指令通道 | 0:键盘运行指令通道 1:端子运行指令通道 2:通讯运行指令通道 | 0 | |
通讯运行指令通道选择 | 0:Modbus通讯通道 1:PROFIBUS通讯通道/CANopen通讯通道/Devicenet通讯通道 2:以太网通讯通道 3:EtherCat通讯通道/Profinet通讯通道 4:可编程扩展卡通信通道 5:无线通信卡通道 | 0 | |
电机参数自学习 | 0:无操作 1:旋转自学习1;进行电机参数的全面自学习,对控制精度要求比较高的场合建议使用旋转自学习方式。 2:静止自学习1(全面学习);适用于电机无法脱开负载的场合,对电机参数进行自学习。 3:静止自学习2(部分学习);当前电机为电机1时,只学习P02.06、P02.07、P02.08;当前电机为电机2时,只学习P12.06、P12.07、P12.08。 4:旋转自学习2:与旋转自学习1类似,但只对异步机有效。 5:静止自学习3(部分学习):只对异步机有效。 | 0 | |
功能参数恢复 | 0:无操作 1:恢复缺省值 2:清除故障档案 注意:所选功能操作完成后,该功能码自动恢复到0。恢复缺省值可以清除用户密码,请大家谨慎使用此功能。 | 0 | |
电机1类型 | 0:异步电机 1:同步电机 | 0 | |
异步电机1额定功率 | 0.1~3000.0kW | 机型确定 | |
异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz | |
异步电机1额定转速 | 1~60000rpm | 机型确定 | |
异步电机1额定电压 | 0~1200V | 机型确定 | |
异步电机1额定电流 | 0.8~6000.0A | 机型确定 | |
同步电机1额定功率 | 0.1~3000.0kW | 机型确定 | |
同步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz | |
同步电机1极对数 | 1~50 | 2 | |
同步电机1额定电压 | 0~1200V | 机型确定 | |
同步电机1额定电流 | 0.8~6000.0A | 机型确定 | |
多功能数字量输入端子(S1~S4,HDIA,HDIB)功能选择 | 36:命令切换到键盘 37:命令切换到端子 38:命令切换到通讯 | ||
预留变量 | |||
QUICK/JOG键 功能选择 | 范围:0x00~0x27 个位:QUICK/JOG键功能选择 0:无功能 1:点动运行 2:保留 3:正转反转切换 4:清除UP/DOWN设定 5:自由停车 6:实现运行命令给定方式按顺序切换 7:保留 十位:保留 | 0x01 |
5.5.2 矢量控制
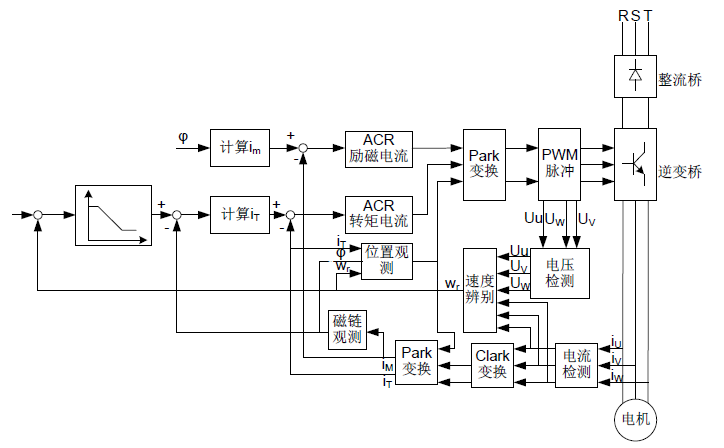
由于异步电机高阶、非线性、强耦合和多变量的系统特征,因而其实际控制非常困难,矢量控制理论主要是解决普通异步电机难于控制的一种控制方法,其主体的思想是:通过测量和控制异步电机的定子电流矢量,按照磁场定向的原则,将定子电流矢量分解为励磁电流(产生电机内部磁场的电流分量)和转矩电流(产生转矩的电流分量),分别对两个分量的幅值和相位进行控制(实际上就是对电机定子电流矢量的控制),实现励磁电流和转矩电流的解耦控制,最终实现异步电机的高性能调速。
GD350-CCS系列内置了无速度传感器矢量控制算法,其可以同时驱动异步电机和永磁同步电机。由于矢量控制的核心算法基于准确的电机参数模型,电机参数的准确性将会对矢量控制的控制性能有所影响。因而在进行矢量运行之前,建议客户准确输入电机参数,并对电机进行参数自学习。
由于矢量控制算法比较复杂,进行内部参数调整时需要用户较高的理论水平,因而建议客户对矢量控制专用功能参数谨慎调整。
功能码 | 名称 | 参数详细说明 | 缺省值 |
速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注意:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 | |
电机参数自学习 | 0:无操作 1:旋转自学习1;进行电机参数的全面自学习,对控制精度要求比较高的场合建议使用旋转自学习方式。 2:静止自学习1(全面学习);适用于电机无法脱开负载的场合,对电机参数进行自学习。 3:静止自学习2(部分学习);当前电机为电机1时,只学习P02.06、P02.07、P02.08;当前电机为电机2时,只学习P12.06、P12.07、P12.08。 4:旋转自学习2:与旋转自学习1类似,但只对异步机有效。 5:静止自学习3(部分学习):只对异步机有效。 | 0 | |
电机1类型 | 0:异步电机 1:同步电机 | 0 | |
速度环比例增益1 | 0~200.0 | 20.0 | |
速度环积分时间1 | 0.000~10.000s | 0.200s | |
切换低点频率 | 0.00Hz~P03.05 | 5.00Hz | |
速度环比例增益2 | 0~200.0 | 20.0 | |
速度环积分时间2 | 0.000~10.000s | 0.200s | |
切换高点频率 | 10.00Hz | ||
速度环输出滤波 | 0~8(对应0~28/10ms) | 0 | |
矢量控制电动转差补偿系数 | 50%~200% | 100% | |
矢量控制制动转差补偿系数 | 50%~200% | 100% | |
电流环比例系数P | 0~65535 | 1000 | |
电流环积分系数I | 0~65535 | 1000 | |
转矩设定方式选择 | 1:键盘设定转矩(P03.12) 2:模拟量AI1设定转矩(100%相对于3倍的电机额定电流) 3:模拟量AI2设定转矩(同上) 4:模拟量AI3设定转矩(同上) 5:脉冲频率HDIA设定转矩(同上) 6:多段转矩设定(同上) 7:Modbus通讯设定转矩 8:PROFIBUS/CANopen/DeviceNET通讯设定转矩 9:以太网通讯设定转矩 10:脉冲频率HDIB设定转矩(100%相对于3倍的电机额定电流) 11:EtherCat/Profinet通讯设定 12:可编程扩展卡设定 注意:设定方式2~6和10,100%对应于3倍的电机额定电流。 | 1 | |
键盘设定转矩 | -300.0%~300.0%(电机额定电流) | 50.0% | |
转矩给定滤波时间 | 0.000~10.000s | 0.010s | |
转矩控制正转上限频率设定源选择 | 0:键盘设定上限频率(P03.16) 1:模拟量AI1设定上限频率(100%对应最大频率) 2:模拟量AI2设定上限频率(同上) 3:模拟量AI3设定上限频率(同上) 4:脉冲频率HDIA设定上限频率(同上) 5:多段设定上限频率(同上) 6:Modbus通讯设定上限频率(同上) 7:PROFIBUS/CANopen/DeviceNET通讯设定上限频率(同上) 8:以太网通讯设定上限频率(同上) 9:脉冲频率HDIB设定上限频率(同上) 10:EtherCat/Profinet通讯设定 11:可编程扩展卡设定 12:保留 注意:设定方式5.55.500%相对于最大频率。 | 0 | |
转矩控制反转上限频率设定源选择 | 0:键盘设定上限频率(P03.17设定) 5.51:同P03.14内容 | 0 | |
转矩控制正转上限频率键盘限定值 | 设定范围:0.00 Hz~P00.03(最大输出频率) | 50.00Hz | |
转矩控制反转上限频率键盘限定值 | 50.00Hz | ||
电动转矩上限设定源选择 | 0:键盘设定转矩上限(P03.20) 1:模拟量AI1设定转矩上限(100%相对于3倍电机额定电流) 2:模拟量AI2设定转矩上限(同上) 3:模拟量AI3设定转矩上限(同上) 4:脉冲频率HDIA设定转矩上限(同上) 5:Modbus通讯设定转矩上限 6:PROFIBUS/CANopen/DeviceNET通讯设定转矩上限 7:以太网通讯设定转矩上限 8:脉冲频率HDIB设定转矩(100%相对于3倍电机额定电流) 9:EtherCat/Profinet通讯设定 10:可编程扩展卡设定 11:保留 注意:设定方式1~4和8,100%相对于3倍电机电流。 | 0 | |
制动转矩上限设定源选择 | 0:键盘设定转矩上限(P03.21设定值) 5.50:同P03.18内容 | 0 | |
电动转矩上限键盘设定 | 0.0~300.0%(电机额定电流) | 180.0% | |
制动转矩上限键盘设定 | 180.0% | ||
恒功区弱磁系数 | 0.1~2.0 | 0.3 | |
恒功区最小弱磁点 | 10%~100% | 20% | |
最大电压限制 | 0.0~120.0% | 100.0% | |
预激磁时间 | 0.000~10.000s | 0.300s | |
转矩控制使能 | 0:禁止 1:使能 | 0 | |
弱磁积分增益 | 0~8000 | 1200 | |
控制优化选择 | 0~0x5.51 个位:转矩指令选择 0:转矩给定 1:转矩电流给定 十位:保留 0:保留 1:保留 百位:速度环积分分离使能 0:不使能 1:使能 千位:保留 0:保留 1:保留 范围:0x0000~0x5.51 | 0x0000 | |
速度环微分增益 | 0.00~10.00s | 0.00s | |
高频电流环比例系数 | 闭环矢量控制模式下(P00.00=3),在电流环高频切换点(P03.39)以下,电流环PI参数为P03.09、P03.10,在电流环高频切换点以上,电流环PI参数为P03.37、P03.38。 P03.37设定范围:0~65535 P03.38设定范围:0~65535 P03.39设定范围:0.0~100.0%(相对最大频率) | 1000 | |
高频电流环积分系数 | 1000 | ||
电流环高频切换点 | 100.0% | ||
磁链 | 0.0~200.0% | 0.0% |
5.5.3 空间电压矢量控制模式
GD350-CCS变频器还内置了空间电压矢量控制功能,对于空间电压矢量控制可以用于各种控制精度要求不高的场合,对于一拖多的应用场合,也建议采用空间电压矢量控制模式。
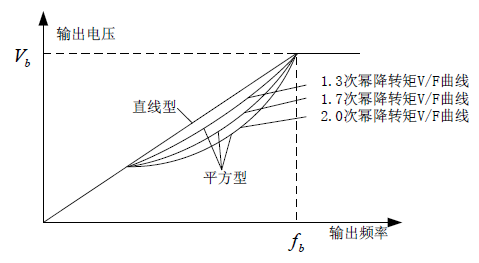
GD350-CCS变频器提供了多种V/F曲线模式选择,用户可以根据现场的需要来选择对应的V/F曲线,也可以根据自己的需求,来设置对应的V/F曲线。
建议:
1、 对于恒定力矩的负载,如直线运行的传送带等负载,由于其在整个运行过程中要求力矩恒定,所以选择直线型V/F曲线。
2、 对于递减力矩特性的负载,如风机、水泵等负载,由于其实际转矩与转速之间呈2次方或者是3次方的关系,因而可以选择对应的1.3、1.7或2次幂的V/F曲线。
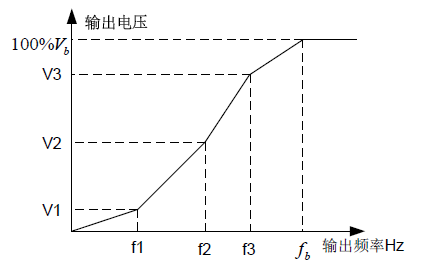
GD350-CCS系列变频器还提供了多点的V/F曲线,用户可以通过分别设置中间三点的电压和频率来改变变频器输出的V/F曲线,整个曲线由5点组成,起点为(0Hz、0V),终点为(电机基频、电机额定电压),在设置过程中要求:0≤f1≤f2≤f3≤电机基频;0≤V1≤V2≤V3≤电机额定电压。
GD350-CCS系列变频器为空间电压矢量控制模式设置专用的功能码,通过设置可以有效提升空间电压矢量控制的性能:
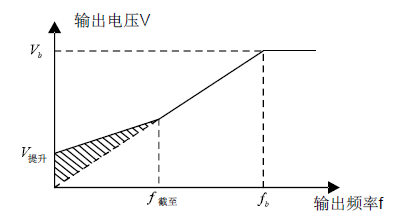
(1)转矩提升
转矩提升功能,可以有效补偿空间电压矢量控制时的低速转矩性能,出厂缺省为自动转矩提升功能,由变频器根据实际的负载情况,自动调节转矩提升值。
注意:
1、 转矩提升只有在转矩提升截止频率之下才起作用;
2、 转矩提升过大,会引起电机的低频振动甚至过流故障发生,遇到这种情况请调小转矩提升值。
(2)节能运行
变频器在实际运行中,可以自动寻找效率最高点进行运行,使得变频器始终工作在效率最高的状态,达到节能的目的。
注意:
1、 该功能一般应用在轻载或者是空载运行比较多的场合。
2、 对于负载需要经常突变的场合,不适合选用该功能。
(3)V/F转差补偿增益
空间电压矢量控制属于开环模式,当电机负载突变时,会引起电机转速的波动,对于一些对速度要求比较高的场合,可以通过设置转差补偿增以来通过变频器内部调节输出的方式,补偿负载波动所引起的速度变化。
转差补偿增益的设定范围为:0~200%,其中100%对应额定转差频率。
注:额定转差频率=(电机额定同步转速-电机额定转速)*电机极对数/60
(4)振荡抑制
电机振荡是在大功率传动场合采用空间电压矢量控制模式运行时常常遇到的问题,为了解决这个问题,GD350-CCS系列增加了两个设置抑制振荡因子的功能码,用户可以根据发生振荡的频率来分别设置相对应的功能码。
注意:设置值越大抑制效果越明显,但是设置值过大也容易造成变频器输出电流过大等问题。
(5)异步电机IF控制
IF控制一般只对异步电机有效,同步电机只在极低频率可以使用,因此,有关IF控制的阐述只针对异步电机。IF控制是通过对变频器输出总电流进行闭环控制,输出电压自动适应给定电流的大小,同时独立开环控制电压和电流的频率。
自定义V/F曲线(V/F分离)功能:
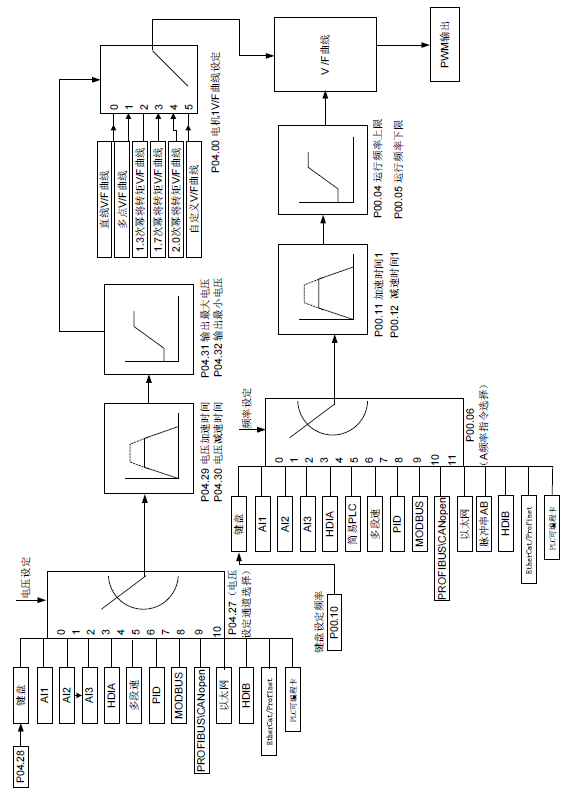
当用户选择GD350-CCS系列的自定义V/F曲线功能时,用户可以分别设定电压和频率的给定通道,以及对应电压和频率的加减速时间,由二者最终组合成实时的V/F曲线。
注意:这种V/F曲线分离的应用适用于各种变频电源的场合,但是用户在设置和调节参数时必须慎重,参数设置不当,可能引起机器损坏。
功能码 | 名称 | 参数详细说明 | 缺省值 |
速度控制模式 | 0:无PG矢量控制模式0 1:无PG矢量控制模式1 2:空间电压矢量控制模式 3:闭环矢量控制模式 注:当选择0、1、3矢量模式时,应先对变频器进行电机参数自学习。 | 2 | |
最大输出频率 | P00.04~400.00Hz | 50.00Hz | |
运行频率上限 | 50.00Hz | ||
运行频率下限 | 0.00Hz~P00.04 | 0.00Hz | |
加速时间1 | 0.0~3600.0s | 机型确定 | |
减速时间1 | 0.0~3600.0s | 机型确定 | |
电机1类型 | 0:异步电机 1:同步电机 | 0 | |
异步电机1额定频率 | 0.01Hz~P00.03(最大输出频率) | 50.00Hz | |
异步电机1额定电压 | 0~1200V | 机型确定 | |
电机1V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 | |
电机1转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% | |
电机1转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% | |
电机1 V/F频率点1 | 0.00Hz~P04.05 | 0.00Hz | |
电机1 V/F电压点1 | 0.0%~110.0% | 0.0% | |
电机1 V/F频率点2 | 0.00Hz | ||
电机1 V/F电压点2 | 0.0%~110.0% | 0.0% | |
电机1 V/F频率点3 | 0.00Hz | ||
电机1 V/F电压点3 | 0.0%~110.0% | 0.0% | |
电机1 V/F转差补偿增益 | 0.0~200.0% | 100.0% | |
电机1低频抑制振荡因子 | 0~100 | 10 | |
电机1高频抑制振荡因子 | 0~100 | 10 | |
电机1抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz | |
电机2 V/F曲线设定 | 0:直线V/F曲线; 1:多点V/F曲线 2:1.3次幂降转矩V/F曲线 3:1.7次幂降转矩V/F曲线 4:2.0次幂降转矩V/F曲线 5:自定义V/F(V/F分离) | 0 | |
电机2转矩提升 | 0.0%:(自动)0.1%~10.0% | 0.0% | |
电机2转矩提升截止 | 0.0%~50.0%(电机1额定频率) | 20.0% | |
电机2 V/F频率点1 | 0.00Hz~P04.18 | 0.00Hz | |
电机2 V/F电压点1 | 0.0%~110.0% | 0.0% | |
电机2 V/F频率点2 | 0.00Hz | ||
电机2 V/F电压点2 | 0.0%~110.0% | 0.0% | |
电机2 V/F频率点3 | 0.00Hz | ||
电机2 V/F电压点3 | 0.0%~110.0% | 0.0% | |
电机2 V/F转差补偿增益 | 0.0~200.0% | 100.0% | |
电机2低频抑制振荡因子 | 0~100 | 10 | |
电机2高频抑制振荡因子 | 0~100 | 10 | |
电机2抑制振荡分界点 | 0.00Hz~P00.03(最大输出频率) | 30.00Hz | |
节能运行选择 | 0:不动作 1:自动节能运行 | 0 | |
电压设定通道选择 | 0:键盘设定电压;输出电压由P04.28决定。 1:AI1设定电压 2:AI2设定电压 3:AI3设定电压 4:HDIA设定电压 5:多段设定电压 6:PID设定电压 7:Modbus通讯设定电压 8:PROFIBUS/CANopen/DeviceNET通讯设定电压 9:以太网通讯设定电压 10:HDIB设定电压 11:EtherCat/Profinet通讯设定 12:可编程扩展卡设定 13:保留 | 0 | |
键盘设定电压值 | 0.0%~100.0%(电机额定电压) | 100.0% | |
电压增加时间 | 0.0~3600.0s | 5.0s | |
电压减少时间 | 0.0~3600.0s | 5.0s | |
输出最大电压 | P04.32~100.0%(电机额定电压) | 100.0% | |
输出最小电压 | 0.0%~P04.31(电机额定电压) | 0.0% | |
恒功区弱磁系数 | 1.00~1.30 | 1.00 | |
同步电机V/F拉入电流1 | 同步电机V/F控制时有效,用于设置输出频率小于P04.36设定频率时电机的无功电流。 设置范围:-100.0%~100.0%(电机额定电流) | 20.0% | |
同步电机V/F拉入电流2 | 同步电机VF控制时有效,用于设置输出频率大于P04.36设定频率时电机的无功电流。 设置范围:-100.0%~100.0%(电机额定电流) | 10.0% | |
同步电机V/F拉入电流频率切换点 | 同步电机V/F控制时有效,用于设置拉入电流1和拉入电流2的切换频率。 设置范围:0.00Hz~P00.03(最大频率) | 50.00Hz | |
同步电机V/F无功闭环比例系数 | 同步电机V/F控制时有效,用于设置无功电流闭环控制的比例系数。 设置范围:0~3000 | 50 | |
同步电机V/F无功闭环积分时间 | 同步电机V/F控制时有效,用于设置无功电流闭环控制的积分系数。 设置范围:0~3000 | 30 | |
同步电机V/F无功闭环输出限幅 | 同步电机V/F控制时有效,用于设置无功电流闭环控制的输出限幅值,该值越大,无功闭环补偿的电压值越高,电机出力越大,一般不用调整。 设置范围:0~16000 | 8000 | |
异步电机1 IF模式使能选择 | 0:无效 1:使能 | 0 | |
异步电机1 IF电流设定 | 设定异步电机1 IF控制时,输出电流的大小,电机额定电流的百分数。 设置范围:0.0~200.0% | 120.0% | |
异步电机1 IF比例系数 | 异步电机1 IF控制,输出电流闭环控制的比例系数。 设置范围:0~5000 | 650 | |
异步电机1 IF积分系数 | 异步电机1 IF控制,输出电流闭环控制的 积分系数。 设置范围:0~5000 | 350 | |
切出异步电机1 IF模式起始频率点 | 0.00~P04.50 | 10.00Hz | |
异步电机2 IF模式使能选择 | 0:无效 1:使能 | 0 | |
异步电机2 IF电流设定 | 设定异步电机2 IF控制时,输出电流的大小,电机额定电流的百分数。 设置范围:0.0~200.0% | 120.0% | |
异步电机2 IF比例系数 | 设定异步电机2 IF控制时,输出电流闭环控制的比例系数。设置范围:0~5000 | 650 | |
异步电机2 IF积分系数 | 设定异步电机2 IF控制时,输出电流闭环控制的积分系数。设置范围:0~5000 | 350 | |
切出异步电机2 IF模式起始频率点 | 0.00~P04.51 | 10.00Hz | |
切出异步电机1 IF模式结束频率点 | P04.44~P00.03 | 25.00Hz | |
切出异步电机2 IF模式结束频率点 | P04.49 ~ P00.03 | 25.00Hz |