5.5.11 数字量输出
GD350-CCS系列标配2组继电器输出端子、1路开路集电极Y输出端子和1路高速脉冲输出(HDO)端子。所有数字量输出端子功能全部可以通过功能码进行编程。其中高速脉冲输出端子HDO还可以通过功能码选择设置为高速脉冲输出或者是开关量输出。
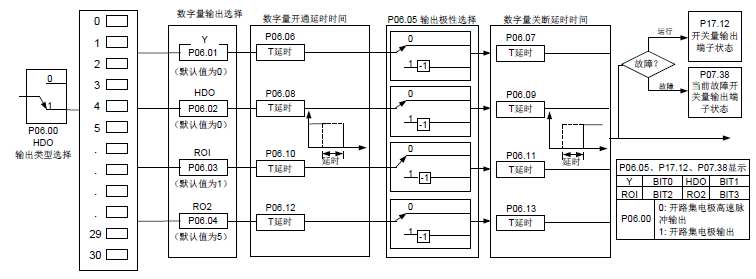
下表为以上四个功能参数的可选项,允许重复选取相同的输出端子功能。
设定值 | 功能 | 说明 |
0 | 无效 | 输出端子无任何功能 |
1 | 运行中 | 当变频器运行,有频率输出时,输出ON信号 |
2 | 正转运行中 | 当变频器正转运行,有频率输出时,输出ON信号 |
3 | 反转运行中 | 当变频器反转运行,有频率输出时,输出ON信号 |
4 | 点动运行中 | 当变频器点动运行,有频率输出时,输出ON信号 |
5 | 变频器故障 | 当变频器发生故障时,输出ON信号 |
6 | 频率水平检测FDT1 | |
7 | 频率水平检测FDT2 | |
8 | 频率到达 | 请参考功能码P08.36的详细说明 |
9 | 零速运行中 | 变频器输出频率与给定频率同为零时,输出ON信号 |
10 | 上限频率到达 | 运行频率到达上限频率时,输出ON信号 |
11 | 下限频率到达 | 运行频率到达下限频率时,输出ON信号 |
12 | 运行准备就绪 | 主回路和控制回路电源建立,变频器保护功能不动作,变频器处于可运行状态时,输出ON信号 |
13 | 预励磁中 | 变频器预励磁时,输出ON信号 |
14 | 过载预警 | |
15 | 欠载预警 | |
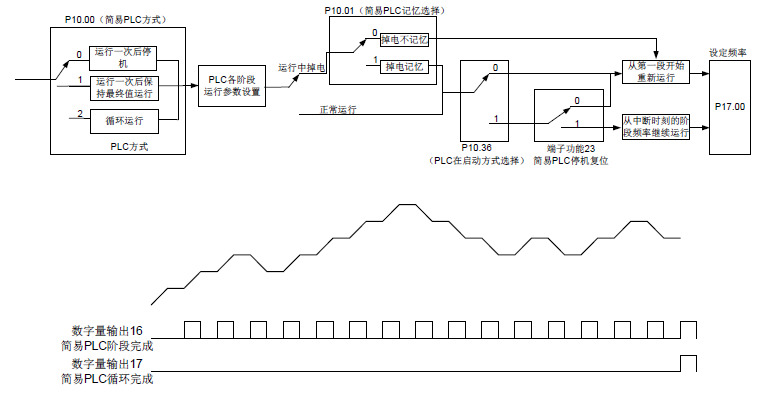
16 | 简易PLC阶段完成 | 当简易PLC当前阶段运转完成后,输出信号 |
17 | 简易PLC循环完成 | 当简易PLC运行完成一个循环后,输出信号 |
23 | Modbus通讯虚拟端子输出 | 可以按照Modbus的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
24 | POROFIBUS/CANopen/DeviceNET通讯虚拟端子输出 | 根据PROFIBUS/CANopen的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
25 | 以太网通讯虚拟端子输出 | 根据以太网的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
26 | 直流母线电压建立完成 | 当母线电压达到逆变器欠压点以上时,输出有效 |
27 | z脉冲输出 | 编码器Z脉冲到达后输出有效,持续10毫秒后无效 |
28 | 脉冲叠加中 | 脉冲叠加端子输入功能有效时,输出有效 |
29 | STO动作 | 发生STO故障时输出 |
30 | 定位完成 | 位置控制定位完成,输出有效 |
31 | 主轴回零完成 | 主轴回零完成后,输出有效 |
32 | 主轴分度完成 | 主轴分度完成后,输出有效 |
33 | 速度极限中 | 频率限幅后输出有效 |
34 | EtherCat/Profinet通讯虚拟端子输出 | 根据Profinet通讯的设定值来输出对应的信号,当设定为1时输出ON信号,0时输出OFF信号 |
35 | 保留 | |
36 | 速度/位置控制切换完成 | 模式切换完成后输出有效 |
37~40 | 保留 | |
41 | C_Y1 | 来自PLC卡的C_Y1(P27.00需设置为1) |
42 | C_Y2 | 来自PLC卡的C_Y2(P27.00需设置为1) |
43 | C_HDO | 来自PLC卡的C_HDO(P27.00需设置为1) |
44 | C_RO1 | 来自PLC卡的C_RO1(P27.00需设置为1) |
45 | C_RO2 | 来自PLC卡的C_RO2(P27.00需设置为1) |
46 | C_RO3 | 来自PLC卡的C_RO3(P27.00需设置为1) |
47 | C_RO4 | 来自PLC卡的C_RO4(P27.00需设置为1) |
48~63 | 保留 |
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
HDO输出类型选择 | 0:开路集电极高速脉冲输出 1:开路集电极输出 | 0 | |
Y1输出选择 | 0:无效 1:运行中 2:正转运行中 3:反转运行中 4:点动运行中 5:变频器故障 6:频率水平检测FDT1 7:频率水平检测FDT2 8:频率到达 9:零速运行中 10:上限频率到达 11:下限频率到达 12:运行准备就绪 13:预励磁中 14:过载预警 15:欠载预警 16:简易PLC阶段完成 17:简易PLC循环完成 18:设定记数值到达 19:指定记数值到达 20:外部故障有效 21:保留 22:运行时间到达 23:Modbus通讯虚拟端子输出 24:PROFIBUS/CANopen/DeviceNET通讯虚拟端子输出 25:以太网通讯虚拟端子输出 26:直流母线电压建立完成 27:z脉冲输出 28:脉冲叠加中 29:STO动作 30:定位完成 31:主轴回零完成 32:主轴分度完成 33:速度极限中 34:EtherCat/Profinet通讯虚拟端子输出 35:保留 36:速度/位置控制切换完成 37:任意频率到达 38~40:保留 41:来自PLC卡的C_Y1(P27.00需设置为1) 42:来自PLC卡的C_Y2(P27.00需设置为1) 43:来自PLC卡的C_HDO(P27.00需设置为1) 44:来自PLC卡的C_RO1(P27.00需设置为1) 45:来自PLC卡的C_RO2(P27.00需设置为1) 46:来自PLC卡的C_RO3(P27.00需设置为1) 47:来自PLC卡的C_RO4(P27.00需设置为1) 48~63:保留 | 0 | |
HDO输出选择 | 0 | ||
继电器RO1输出选择 | 1 | ||
继电器RO2输出选择 | 5 | ||
输出端子极性选择 | 0x00~0x0F | 0x00 | |
Y开通延时时间 | 0.000~50.000s | 0.000s | |
Y断开延时时间 | 0.000~50.000s | 0.000s | |
HDO开通延时时间 | 0.000~50.000s(仅P06.00=1有效) | 0.000s | |
HDO断开延时时间 | 0.000~50.000s(仅P06.00=1有效) | 0.000s | |
继电器RO1开通延时时间 | 0.000~50.000s | 0.000s | |
继电器RO1断开延时时间 | 0.000~50.000s | 0.000s | |
继电器RO2开通延时时间 | 0.000~50.000s | 0.000s | |
继电器RO2断开延时时间 | 0.000~50.000s | 0.000s | |
最近故障输出端子状态 | 0 | ||
开关量输出端子状态 | 0 |
5.5.12 简易PLC
简易PLC功能是一个多段速度发生器,变频器可以根据运行时间自动变换运行频率、方向,以满足工艺要求。以前该功能需要外部PLC来辅助完成,现在依靠变频器本身就可以实现该功能。
本系列变频器可以实现16段速度控制,有4组加减速时间可供选择。
当所设定的PLC完成一个循环(或者是一段)后,可由多功能继电器输出一个ON信号。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
数字量输入功能选择 | 23:简易PLC停机复位 24:简易PLC暂停 25:PID控制暂停 | ||
数字量输出功能选择 | 16:简易PLC阶段到达 17:简易PLC循环到达 | ||
简易PLC方式 | 0:运行一次后停机 1:运行一次后保持最终值运行 2:循环运行 | 0 | |
简易PLC记忆选择 | 0:掉电不记忆 1:掉电记忆 | 0 | |
多段速0 | -100.0~100.0% | 0.0% | |
第0段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速1 | -100.0~100.0% | 0.0% | |
第1段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速2 | -100.0~100.0% | 0.0% | |
第2段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速3 | -100.0~100.0% | 0.0% | |
第3段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速4 | -100.0~100.0% | 0.0% | |
第4段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速5 | -100.0~100.0% | 0.0% | |
第5段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速6 | -100.0~100.0% | 0.0% | |
第6段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速7 | -100.0~100.0% | 0.0% | |
第7段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速8 | -100.0~100.0% | 0.0% | |
第8段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速9 | -100.0~100.0% | 0.0% | |
第9段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速10 | -100.0~100.0% | 0.0% | |
第10段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速11 | -100.0~100.0% | 0.0% | |
第11段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速12 | -100.0~100.0% | 0.0% | |
第12段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速13 | -100.0~100.0% | 0.0% | |
第13段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速14 | -100.0~100.0% | 0.0% | |
第14段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速15 | -100.0~100.0% | 0.0% | |
第15段运行时间 | 0.0~6553.5s(min) | 0.0s | |
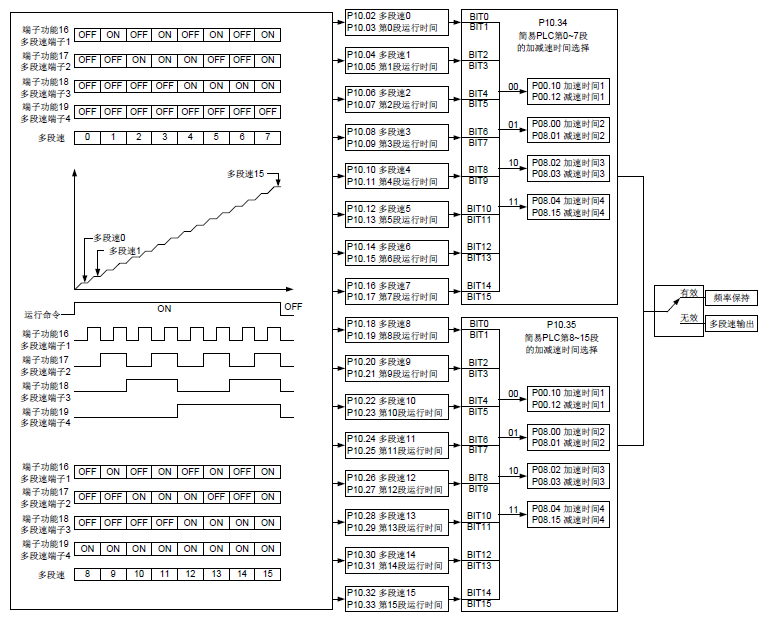
简易PLC第0~7段的加减速时间选择 | 0x0000~0XFFFF | 0000 | |
简易PLC第8~15段的加减速时间选择 | 0x0000~0XFFFF | 0000 | |
PLC再启动方式选择 | 0:从第一段开始重新运行 1:从中断时刻的阶段频率继续运行 | 0 | |
设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz | |
简易PLC当前段数 | 显示简易PLC功能当前多段速段数 | 0 |
5.5.13 多段速运行
设定用变频器进行多段速度运行时参数。GD350-CCS系列变频器可设定16段速度,由多段速端子1~4的组合编码选择,分别对应多段速度0至多段速度15。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
数字量输入功能选择 | 16:多段速端子1 17:多段速端子2 18:多段速端子3 19:多段速端子4 20:多段速暂停 | ||
多段速0 | -100.0~100.0% | 0.0% | |
第0段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速1 | -100.0~100.0% | 0.0% | |
第1段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速2 | -100.0~100.0% | 0.0% | |
第2段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速3 | -100.0~100.0% | 0.0% | |
第3段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速4 | -100.0~100.0% | 0.0% | |
第4段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速5 | -100.0~100.0% | 0.0% | |
第5段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速6 | -100.0~100.0% | 0.0% | |
第6段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速7 | -100.0~100.0% | 0.0% | |
第7段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速8 | -100.0~100.0% | 0.0% | |
第8段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速9 | -100.0~100.0% | 0.0% | |
第9段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速10 | -100.0~100.0% | 0.0% | |
第10段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速11 | -100.0~100.0% | 0.0% | |
第11段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速12 | -100.0~100.0% | 0.0% | |
第12段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速13 | -100.0~100.0% | 0.0% | |
第13段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速14 | -100.0~100.0% | 0.0% | |
第14段运行时间 | 0.0~6553.5s(min) | 0.0s | |
多段速15 | -100.0~100.0% | 0.0% | |
第15段运行时间 | 0.0~6553.5s(min) | 0.0s | |
简易PLC第0~7段的加减速时间选择 | 0x0000~0XFFFF | 0000 | |
简易PLC第8~15段的加减速时间选择 | 0x0000~0XFFFF | 0000 | |
简易PLC当前段数 | 显示简易PLC功能当前多段速段数 | 0 |
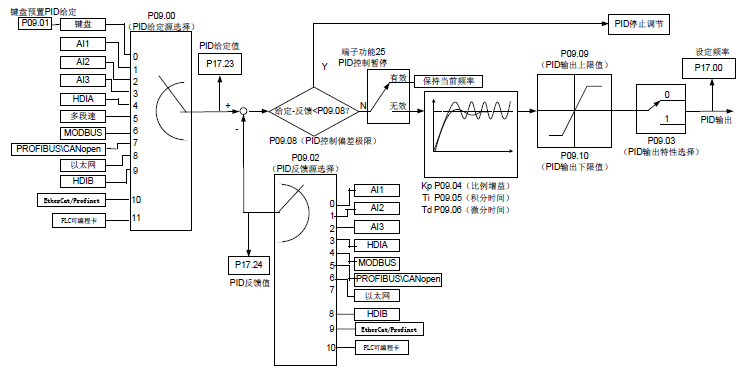
5.5.14 PID控制
PID控制是用于过程控制的一种常用方法,通过对被控量的反馈信号与目标量信号的差量进行比例、积分、微分运算,来调整变频器的输出频率或输出电压,构成负反馈系统,使被控量稳定在目标量上。适用于流量控制、压力控制及温度控制等过程控制。调整输出频率的基本原理框图如下:
PID控制工作原理简要和调节方法简单介绍:
比例调节(Kp):当反馈与给定出现偏差时,输出与偏差成比例调节,若偏差恒定,则调节量也恒定。比例调节可以快速响应反馈的变化,但单纯用比例调节无法做到无差控制。比例增益越大,系统的调节速度越快,但若过大会出现振荡。调节方法为先将积分时间设很长,微分时间设为零,单用比例调节使系统运行起来,改变给定量的大小,观察反馈信号和给定量的稳定的偏差(静差),如果静差在给定量改变的方向上(例如增加给定量,系统稳定后反馈量总小于给定量),则继续增加比例增益,反之则减小比例增益,重复上面的过程,直到静差比较小。
积分时间(Ti):当反馈与给定出现偏差时,输出调节量连续累加,如果偏差持续存在,则调节量持续增加,直到没有偏差。积分调节器可以有效地消除静差。积分调节器过强则会出现反复的超调,使系统一直不稳定,直到产生振荡。由于积分作用过强引起的振荡的特点是:反馈信号在给定量的上下摆动,摆幅逐步增大,直至振荡。积分时间参数的调节一般由大到小调,逐步调节积分时间,观察系统调节的效果,直到系统稳定的速度达到要求。
微分时间(Td):当反馈与给定的偏差变化时,输出与偏差变化率成比例的调节量,该调节量只与偏差变化的方向和大小有关,而与偏差本身的方向和大小无关。微分调节的作用是在反馈信号发生变化时,根据变化的趋势进行调节,从而抑制反馈信号的变化。微分调节器请谨慎使用,因为微分调节容易放大系统的干扰,尤其是变化频率较高的干扰。
当频率指令选择(P00.06、P00.07)为7或者电压设定通道选择(P04.27)为6时,变频器运行模式为过程PID控制。
5.5.14.1 PID参数设定的一般步骤
1、 确定比例增益P
确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
2、 确定积分时间Ti
比例增益P确定后,设定一个较大的积分时间数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
3、 确定微分时间Td
微分时间Td一般不用设定,为0即可。
若要设定,与确定P和Ti的方法相同,取不振荡时的30%。
4、 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
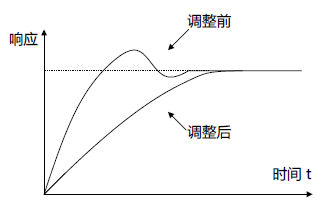
5.5.14.2 PID微调方法
设定PID控制的参数后,可以用以下的方法进行微调。
抑制超调:发生超调时,请缩短微分时间(Td),延长积分时间(Ti)。
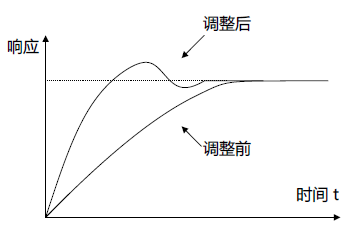
尽快使其达到稳定状态:即使发生超调,但要尽快稳定控制时,请缩短积分时间(Ti),延长微分时间(Td)。
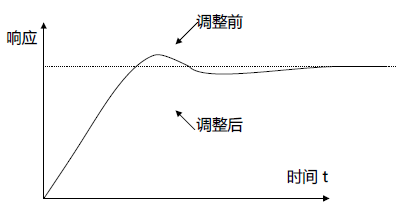
抑制周期较长的振动:如果周期性振动的周期比积分时间(Ti)的设定值还要长时,说明积分动作太强,延长积分时间(Ti)则可抑制振动。
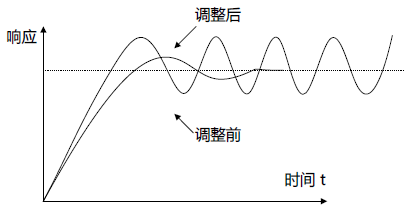
抑制周期较短的振动:振动周期较短,振动周期与微分时间(Td)的设定值几乎相同,说明微分动作太强。如缩短微分时间(Td),则可抑制振动。当将微分时间(Td)设定为0.00(即无微分控制),也无法抑制振动时,请减小比例增益。
相关参数表:
功能码 | 名称 | 参数详细说明 | 缺省值 |
PID给定源选择 | 0:键盘定数字给定(P09.01) 1:模拟通道AI1给定 2:模拟通道AI2给定 3:模拟通道AI3设定 4:高速脉冲HDIA设定 5:多段给定 6:Modbus通讯设定 7:PROFIBUS/CANopen/DevicneNET通讯设定 8:以太网通讯设定 9:高速脉冲HDIB设定 10:EtherCat/Profinet通讯设定 11:可编程扩展卡设定 12:保留 | 0 | |
键盘预置PID给定 | -100.0%~100.0% | 0.0% | |
PID反馈源选择 | 0:模拟通道AI1反馈 1:模拟通道AI2反馈 2:模拟通道AI3反馈 3:高速脉冲HDIA反馈 4:Modbus通讯反馈 5:PROFIBUS/CANopen/DevicneNET通讯设定 6:以太网通讯设定 7:高速脉冲HDIB反馈 8:EtherCat/Profinet通讯设定 9:可编程扩展卡设定 10:保留 | 0 | |
PID输出特性选择 | 0:PID输出为正特性 1:PID输出为负特性 | 0 | |
比例增益(Kp) | 0.00~100.00 | 1.80 | |
积分时间(Ti) | 0.01~10.00s | 0.90s | |
微分时间(Td) | 0.00~10.00s | 0.00s | |
采样周期(T) | 0.000~10.000s | 0.100s | |
PID控制偏差极限 | 0.0~100.0% | 0.0% | |
PID输出上限值 | P09.10~100.0%(最大频率或电压) | 100.0% | |
PID输出下限值 | -100.0%~P09.09(最大频率或电压) | 0.0% | |
反馈断线检测值 | 0.0~100.0% | 0.0% | |
反馈断线检测时间 | 0.0~3600.0s | 1.0s | |
PID调节选择 | 0x0000~0x1111 个位: 0:频率到达上下限继续积分调节 1:频率到达上下限停止积分调节 十位: 0:与主给定方向一致 1:可与主给定方向相反 百位: 0:按照最大频率限幅 1:按照A频率限幅 千位: 0:A+B频率,主给定A频率源缓冲加减速无效 1:A+B频率,主给定A频率源缓冲加减速 有效,加减速由P08.04加速时间4确定 | 0x0001 | |
低频比例增益(Kp) | 0.00~100.00 | 1.00 | |
PID指令加减速时间 | 0.0~1000.0s | 0.0s | |
PID输出滤波时间 | 0.000~10.000s | 0.000s | |
保留 | |||
低频积分时间(Ti) | 0.00~10.00s | 0.90s | |
低频微分时间(Td) | 0.00~10.00s | 0.00s | |
PID参数切换低频点 | 0.00~P09.21 | 5.00Hz | |
PID参数切换高频点 | P09.20~P00.04 | 10.00Hz | |
设定频率 | 0.00Hz~P00.03(最大输出频率) | 0.00Hz | |
PID给定值 | -100.0~100.0% | 0.0% | |
PID反馈值 | -100.0~100.0% | 0.0% |
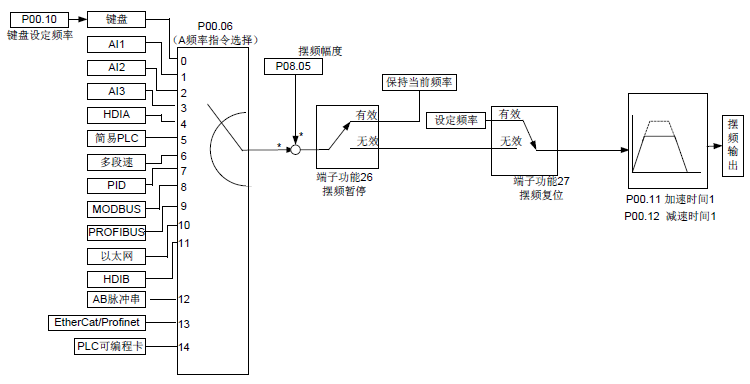
5.5.15 摆频运行
摆频适用于纺织、化纤等行业及需要横动、卷绕功能的场合,其典型工作如图所示:
功能码 | 名称 | 参数详细说明 | 缺省值 |
最大输出频率 | P00.03~400.00Hz | 50.00Hz | |
A频率指令选择 | 0:键盘数字设定 1:模拟量AI1设定 2:模拟量AI2设定 3:模拟量AI3设定 4:高速脉冲HDIA设定 5:简易PLC程序设定 6:多段速运行设定 7:PID控制设定 8:Modbus通讯设定 9:PROFIBUS/CANopen/DeviceNet通讯设定 10:以太网通讯设定 11:高速脉冲HDIB设定 12:AB脉冲串 13:EtherCat/Profinet通讯设定 14:可编程扩展卡 | 0 | |
加速时间1 | 0.0~3600.0s | 机型确定 | |
减速时间1 | 0.0~3600.0s | 机型确定 | |
数字量输入功能选择 | 26:摆频暂停(停在当前频率) 27:摆频复位(回到中心频率) | ||
摆频幅度 | 0.0~100.0%(相对设定频率) | 0.0% | |
突跳频率幅度 | 0.0~50.0%(相对摆频幅度) | 0.0% | |
摆频上升时间 | 0.1~3600.0s | 5.0s | |
摆频下降时间 | 0.1~3600.0s | 5.0s |