功能码 | 名称 | 参数详细说明 | 缺省值 | 更改 |
P09.00 | PID 给定源选择 | 当频率指令选择(P00.06、P00.07)为7或者电压设定通道选择(P04.27)为6时,变频器运行模式为过程PID控制。 此参数决定过程PID的目标量给定通道。 0:键盘定数字给定(P09.01) 1:模拟通道AI1给定(015G/018P及以下通过键盘上模拟电位器设定,018G/022P及以上无AI1设定) 2:模拟通道AI2给定 3:模拟通道AI3设定 4:高速脉冲HDI设定 5:多段给定 6:MODBUS通讯设定 过程PID的设定目标量为相对值,设定的100%对应于被控系统的反馈信号的100%。 系统始终按相对值(0~100.0%)进行运算的。 注意:多段给定,可以通过设置P10组的参数实现。 | 0 | ○ |
P09.01 | 键盘 预置PID给定 | P09.00=0时,需设定此参数,此参数的基准值为系统的反馈量。 设定范围:-100.0%~100.0% | 0.0% | ○ |
P09.02 | PID 反馈源选择 | 通过此参数来选择PID反馈通道。 0:模拟通道AI1反馈(015G/018P及以下通过键盘上模拟电位器设定,018G/022P及以上无AI1设定) 1:模拟通道AI2反馈 2:模拟通道AI3反馈 3:高速脉冲HDI反馈 4:MODBUS通讯反馈5:MAX(AI2,AI3) 注意:给定通道和反馈通道不能重合,否则,PID不能有效控制。 | 0 | ○ |
P09.03 | PID输出 特性选择 | 0:PID输出为正特性:即反馈信号大于PID的给定,要求变频器输出频率下降,才能使PID达到平衡。如收卷的张力PID控制。 1:PID输出为负特性:即反馈信号大于PID的给定,要求变频器输出频率上升,才能使PID达到平衡。如放卷的张力PID控制。 | 0 | ○ |
P09.04 | 比例增益(Kp) | 此功能设定适用于PID输入的比例增益P。 决定整个PID调节器的调节强度,P越大,调节强度越大。该参数为100表示当PID反馈量和给定量的偏差为100%时,PID调节器对输出频率指令的调节幅度为最大频率(忽略积分作用和微分作用)。 设定范围:0.00~100.00 | 1.00 | ○ |
P09.05 | 积分时间(Ti) | 决定PID调节器对PID反馈量和给定量的偏差进行积分调节的快慢。 当PID反馈量和给定量的偏差为100%时,积分调节器(忽略比例作用和微分作用)经过该时间连续调整,调整量达到最大输出频率(P00.03)或最大电压(P04.31)。积分时间越短调节强度越大。 设定范围:0.01~10.00s | 0.10s | ○ |
P09.06 | 微分时间(Td) | 决定PID调节器对PID反馈量和给定量的偏差的变化率进行调节的强度。 若反馈量在该时间内变化100%,微分调节器的调整量为最大输出频率(P00.03)或最大电压(P04.31)(忽略比例作用和积分作用)。微分时间越长调节强度越大。 设定范围: 0.00~10.00s | 0.00s | ○ |
P09.07 | 采样周期(T) | 指对反馈量的采样周期,在每个采样周期内调节器运算一次。采样周期越大响应越慢。当采样周期设置为0.00s时,采样周期为1ms。 设定范围:0.00~10.000s | 0.100s | ○ |
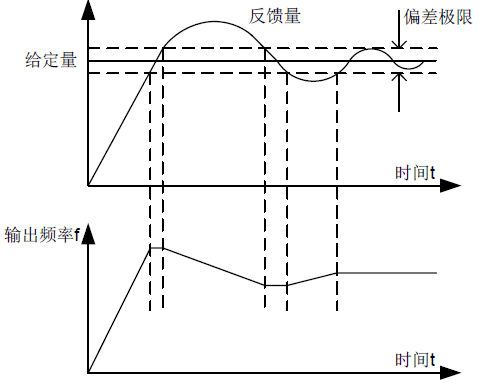
P09.08 | PID控制偏差极限 |
PID系统输出值相对于闭环给定值允许的最大偏差量,如图所示,在偏差极限内,PID调节器停止调节。合理设置该功能码可调节PID系统的精度和稳定性。 设定范围:0.0~100.0% | 0.0% | ○ |
P09.09 | PID 输出上限值 | 用来设定PID调节器输出值的上下限值。 100.0%对应最大输出频率(P00.03)或最大电压(P04.31) P09.09设定范围:P09.10~100.0% P09.10设定范围:-100.0%~P09.09 | 100.0% | ○ |
P09.10 | PID 输出下限值 | 0.0% | ○ | |
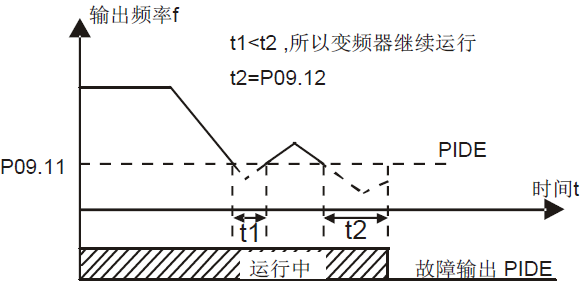
P09.11 | 反馈断线 检测值 | 设定PID反馈断线检测值,当反馈值小于或者等于反馈断线检测值,且持续时间超过P09.12中设定的值,则变频器报“PID反馈断线故障”,键盘显示PIDE。
P09.11设定范围:0.0~100.0% P09.12设定范围:0.0~3600.0s | 0.0% | ○ |
P09.12 | 反馈断线 检测时间 | 1.0s | ○ | |
P09.13 | PID调节选择 | 0x0000~0x1111 LED个位: 0:频率到达上下限继续积分调节;积分量实时响应给定量和反馈量之间的变化,除非已经到达内部的积分限定。当给定量和反馈量之间的大小趋势发生变化时,需要更长的时间来抵消继续积分的影响,积分量才能跟随该趋势的变化。 1:频率到达上下限停止积分调节;积分量保持不变,当给定和反馈量之间的大小趋势发生变化时,积分量会很快跟随该趋势的变化。 LED十位: 0:与设定方向一致;PID调节的输出量和当前的运行方向设定不一致时,内部强制当前输出量为0。 1:与设定方向相反;PID调节的输出量和当前的运行方向设定不一致时,执行和当前设定运行方向相反的闭环调节输出量。 LED百位: 0:按照最大频率限幅 1:按照A频率限幅 LED千位: 0:A+B频率,主给定A频率源缓冲加减速无效 1:A+B频率,主给定A频率源缓冲加减速有效,加减速由P08.04加速时间4确定 | 0x0001 | ○ |
P09.14 | 低频比例增益(Kp) | 0.00~100.00 | 1.00 | ○ |
P09.15 | PID指令加减速时间 | 0.0~1000.0s | 0.0s | ○ |
P09.16 | PID输出滤波时间 | 0.000~10.000s | 0.000s | ○ |