功能码 | 名称 | 参数详细说明 | 缺省值 | 更改 |
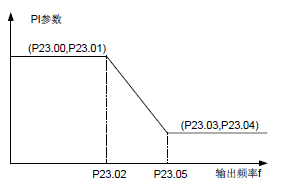
P23.00 | 速度环比例增益1 | P23.00~P23.05的参数只适用于矢量控制模式。在切换频率1(P23.02)以下,速度环PI参数为:P23.00和P23.01。在切换频率2(P23.05)以上,速度环PI参数为:P23.03和P23.04。二者之间,PI参数由两组参数线性变化获得,如下图示:
通过设定速度调节器的比例系数和积分时间,可以调节矢量控制的速度环动态响应特性。增加比例增益,减小积分时间,均可加快速度环的动态响应,但比例增益过大或积分时间过小均容易导致系统振荡,超调过大。比例增益过小也容易导致系统稳态振荡,且有可能存在速度静差。 速度环PI参数与系统的惯性关系密切,针对不同的负载特性需要在缺省PI参数的基础上进行调整,以满足各种场合的需求。 P23.00设定范围:0.0~200.0 P23.01设定范围:0.000~10.000s P23.02设定范围:0.00Hz~P23.05 P23.03设定范围:0.0~200.0 P23.04设定范围:0.000~10.000s P23.05设定范围:P23.02~P00.03(最大输出频率) | 20.0 | ○ |
P23.01 | 速度环积分时间1 | 0.200s | ○ | |
P23.02 | 切换低点频率 | 5.00Hz | ○ | |
P23.03 | 速度环比例增益2 | 20.0 | ○ | |
P23.04 | 速度环积分时间2 | 0.200s | ○ | |
P23.05 | 切换高点频率 | 10.00Hz | ○ | |
P23.06 | 速度环输出滤波 | 0~8(对应0~2^8/10ms) | 0 | ○ |
P23.07 | 矢量控制转差补偿系数(电动) | 转差补偿系数用于调整矢量控制的转差频率,改善系统的速度控制精度,适当调整该参数,可以有效抑制速度静差。 设定范围:50~200% | 100% | ○ |
P23.08 | 矢量控制转差补偿系数(发电) | 100% | ○ | |
P23.09 | 电流环比例系数P | 注意: 1、 这两个参数调节的是电流环的PI调节参数,它直接影响系统的动态响应速度和控制精度,一般情况下用户无需更改该缺省值。 2、 适用于无PG矢量控制模式0(P00.00=0)和闭环矢量控制模式(P00.00=3) 3、 同步电机参数自学习后会自动更新该功能码数值 设定范围:0~65535 | 1000 | ○ |
P23.10 | 电流环积分系数I | 1000 | ○ | |
P23.11 | 速度环微分增益 | 0.00~10.00s | 0.00s | ○ |
P23.12 | 高频电流环比例系数 | 闭环矢量控制模式下(P00.00=3),在电流环高频切换点(P23.14)以下,电流环PI参数为P23.09、P23.10,在电流环高频切换点以上,电流环PI参数为P23.12、P23.13。 P23.12设定范围:0~20000 P23.13设定范围:0~20000 P23.14设定范围:0.0~100.0%(相对最大频率) | 1000 | ○ |
P23.13 | 高频电流环积分系数 | 1000 | ○ | |
P23.14 | 电流环高频切换点 | 100.0% | ○ | |
P23.15~ P23.19 | 预留变量 | 0~65535 | 0 | ● |